Calibrazione guidata
Per avviare la procedura di calibrazione, basta selezionare TwinTool➔
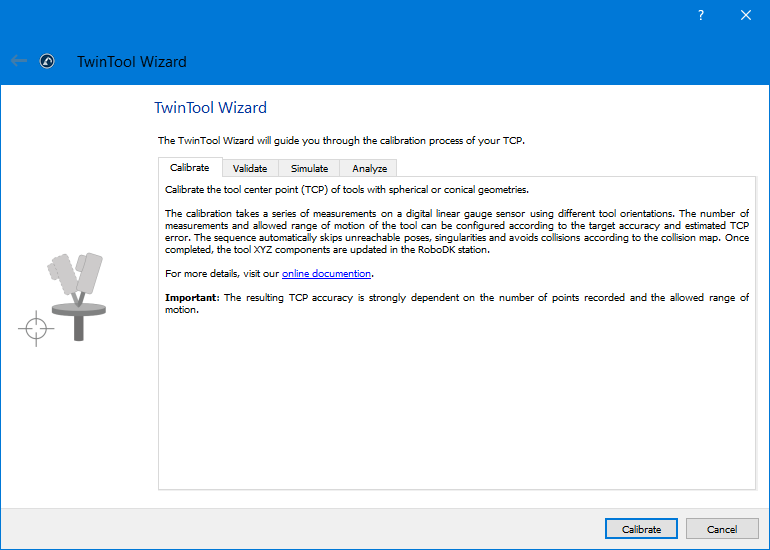
Dopo aver lanciato la procedura guidata, sarà guidato attraverso le configurazioni


Importante: si raccomanda di eseguire la sequenza di calibrazione in modalità di simulazione almeno una volta prima di calibrare sul robot collegato.
Importante: la sequenza simulata potrebbe non corrispondere alla sequenza reale utilizzata per la calibrazione o la convalida. Il percorso del robot viene regolato automaticamente.
Suggerimento: salvi il bersaglio comune della posizione del robot sul sensore, utilizzando un nome diverso da 'Bersaglio Calib'. Può riutilizzarlo per riportare rapidamente il robot in posizione.
Suggerimento: imposti l'errore stimato dell'utensile a 5 mm o meno, se ha già una buona stima del TCP. Questo renderà più veloce la procedura di calibrazione.
Suggerimento: Modifichi la gamma di articolazioni in Z e XY per cambiare la gamma di movimento del robot.