Configurazione personalizzata
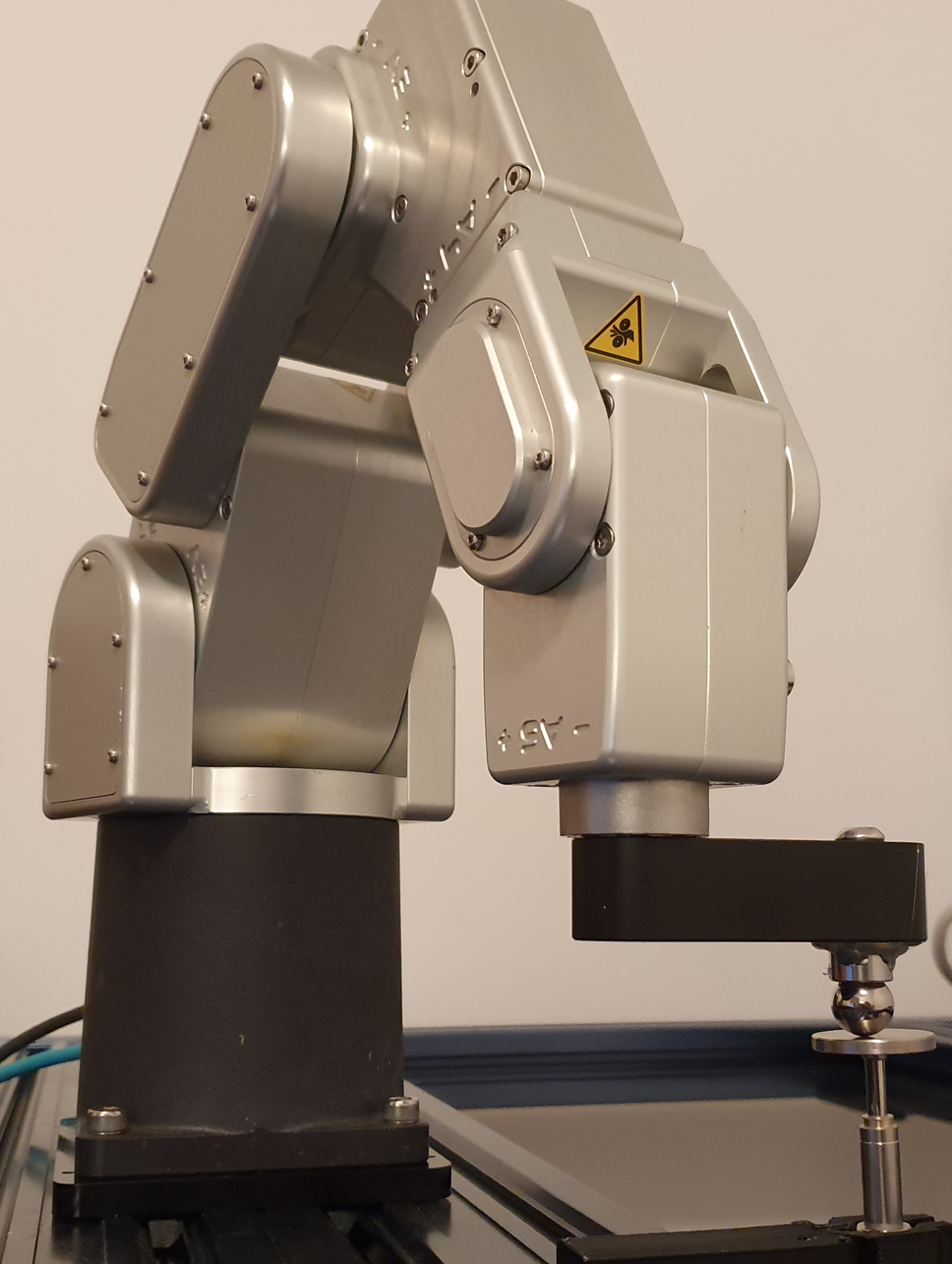
Importante: si raccomanda di modellare i modelli 3D di carico della cella qualsiasi oggetto che possa causare collisioni con il robot o l'utensile. Se ha un utensile che può causare collisioni con il robot (o altre collisioni potenziali), è meglio procedere con una configurazione personalizzata come descritto nella prossima sezione.
Può seguire facoltativamente questi passaggi per modellare correttamente l'ambiente 3D della sua cella.
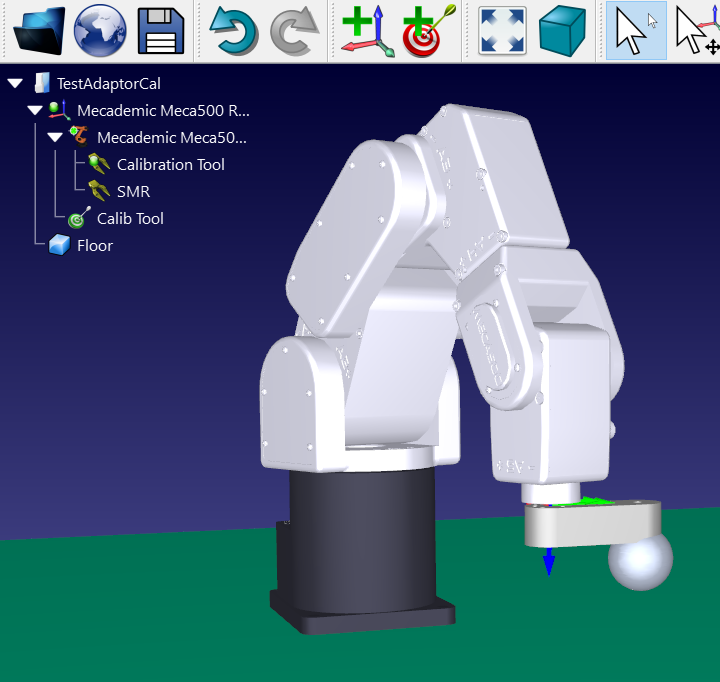
1.Carichi il modello 3D del suo utensile e crei un utensile in RoboDK. Maggiori informazioni nella sezione Crea utensile.
2.Carichi qualsiasi file 3D per modellare la cella. Può caricare file 3D STEP, IGES, STL. Maggiori informazioni nella sezione "Iniziare".
Nota: si raccomanda vivamente di modellare correttamente la cella per evitare collisioni.
Suggerimento: se dispone di una buona stima del punto centrale dell'utensile, può impostarla in RoboDK e aggiornare l'utensile stimato per avere una procedura di calibrazione più rapida.