Per calibrare l'utensile (TCP) con TwinTool, deve caricare il robot in RoboDK e assicurarsi che il sensore e il robot siano collegati. Può opzionalmente modellare la cella aggiungendo i modelli 3D degli oggetti e degli utensili. Questo permetterà di evitare automaticamente le collisioni.
1.Caricare il robot:
a.Selezioni File➔ Aprire la libreria online. La libreria online verrà visualizzata in RoboDK.
b.Utilizzi i filtri per trovare il suo robot.
c.Selezioni Apri per caricare automaticamente il robot nella sua stazione RoboDK.
d.In alternativa, scarichi il file del robot direttamente dalla libreria (https://robodk.com/library) e apra il file con RoboDK (il file .robot).
2.Colleghi il sensore:
a.Colleghi il sensore al computer.
b.Selezioni TwinTool➔ Measure.
c.Si assicuri che il sensore stia misurando e che le misurazioni siano stabili.
Nota: se non è in grado di connettersi subito al sensore, potrà modificare le impostazioni di connessione e salvarle per un uso successivo durante le fasi successive.
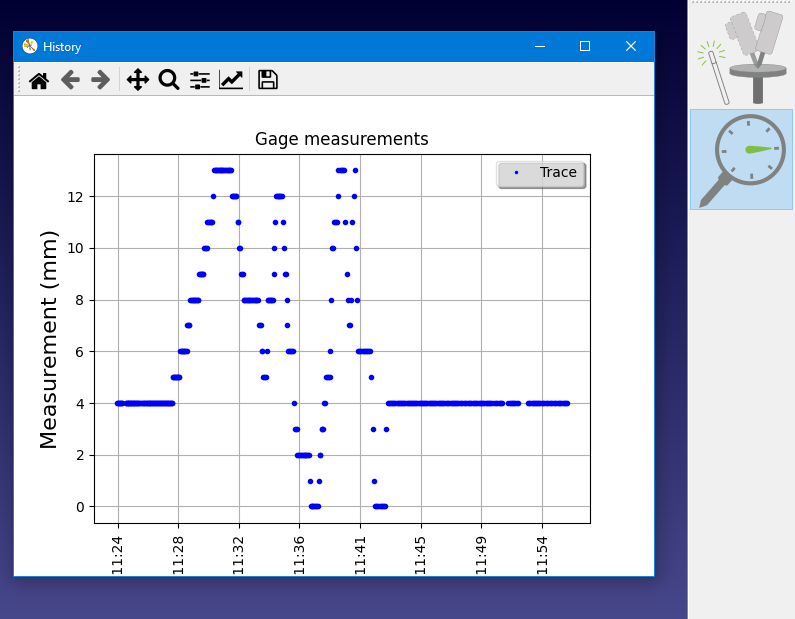
Importante: si assicuri che la configurazione sia sufficientemente rigida per la calibrazione, verificando che le vibrazioni nelle vicinanze non alterino le misurazioni. Ad esempio, collochi il robot sul sensore e provi a creare piccole vibrazioni (come camminare vicino all'area del sensore). La misurazione dovrebbe rimanere stabile entro meno di 0,005 mm di rumore. In caso contrario, si raccomanda vivamente di rafforzare il supporto del sensore e/o la base del robot.
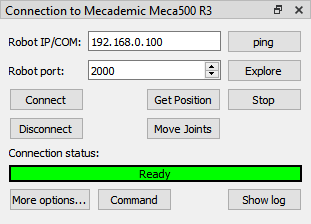
3.Colleghi il robot:
a.Selezioni Collegare➔ Collegare il robot.
b.Inserisca l'IP e la porta del robot.
c.Selezionare Connetti.
Nota: alcuni controllori di robot richiedono di seguire una configurazione specifica o opzioni software specifiche. Maggiori informazioni nella sezione Driver robot.
4.Selezioni Ottieni posizione dal pannello di connessione del robot. Questo passaggio aggiornerà la posizione del robot in RoboDK.
Configurazione personalizzata
Importante: si raccomanda di modellare i modelli 3D di carico della cella qualsiasi oggetto che possa causare collisioni con il robot o l'utensile. Se ha un utensile che può causare collisioni con il robot (o altre collisioni potenziali), è meglio procedere con una configurazione personalizzata come descritto nella prossima sezione.
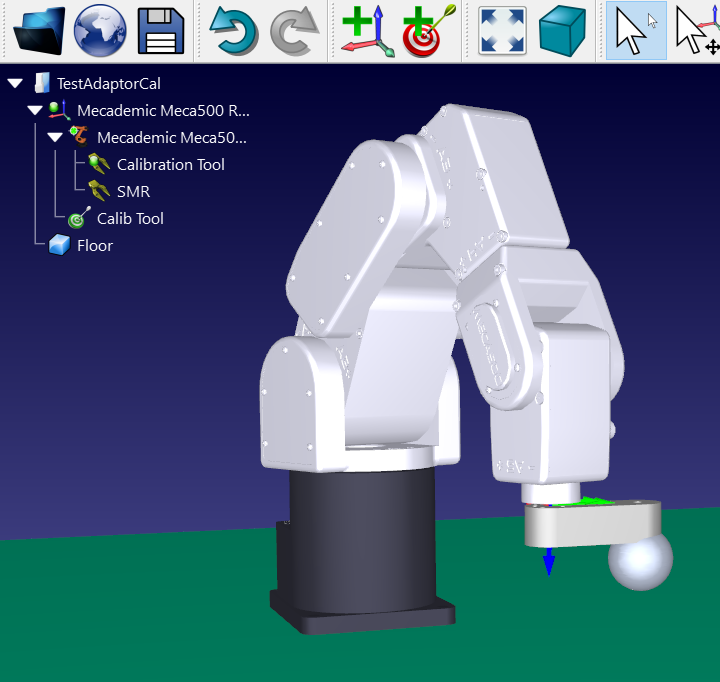
Può seguire facoltativamente questi passaggi per modellare correttamente l'ambiente 3D della sua cella.
1.Carichi il modello 3D del suo utensile e crei un utensile in RoboDK. Maggiori informazioni nella sezione Crea utensile.
2.Carichi qualsiasi file 3D per modellare la cella. Può caricare file 3D STEP, IGES, STL. Maggiori informazioni nella sezione "Iniziare".
Nota: si raccomanda vivamente di modellare correttamente la cella per evitare collisioni.
Suggerimento: se dispone di una buona stima del punto centrale dell'utensile, può impostarla in RoboDK e aggiornare l'utensile stimato per avere una procedura di calibrazione più rapida.
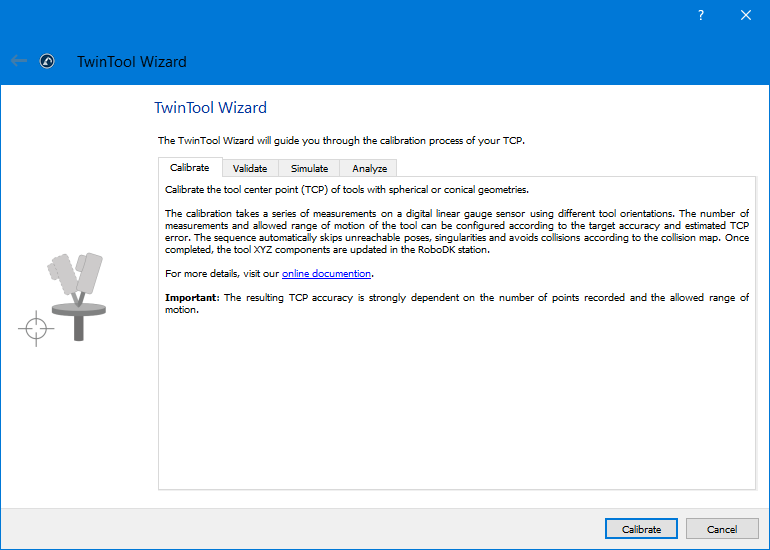
Calibrazione guidata
Per avviare la procedura di calibrazione, basta selezionare TwinTool➔ TwinTool Wizard.
Dopo aver lanciato la procedura guidata, sarà guidato attraverso le configurazioni Calibrazione, Convalida o Simulazione. Questo include l'impostazione della connessione al sensore, la garanzia di uno stato valido del robot e la revisione dei parametri chiave. Segua i passaggi sullo schermo e faccia riferimento ai suggerimenti dello strumento se ha bisogno di ulteriori dettagli.
Importante: si raccomanda di eseguire la sequenza di calibrazione in modalità di simulazione almeno una volta prima di calibrare sul robot collegato.
Importante: la sequenza simulata potrebbe non corrispondere alla sequenza reale utilizzata per la calibrazione o la convalida. Il percorso del robot viene regolato automaticamente.
Suggerimento: salvi il bersaglio comune della posizione del robot sul sensore, utilizzando un nome diverso da 'Bersaglio Calib'. Può riutilizzarlo per riportare rapidamente il robot in posizione.
Suggerimento: imposti l'errore stimato dell'utensile a 5 mm o meno, se ha già una buona stima del TCP. Questo renderà più veloce la procedura di calibrazione.
Suggerimento: Modifichi la gamma di articolazioni in Z e XY per cambiare la gamma di movimento del robot.