Requisiti
Deve installare l'App RoboDK TwinTool e disporre di un sensore compatibile per eseguire la calibrazione automatica dello strumento.
Si assicuri di avere i seguenti elementi:
1.Uno o più bracci robotici.
2.Un comparatore compatibile (noto anche come LVDT o calibro lineare).
3.Il software RoboDK deve essere installato e deve essere disponibile una licenza appropriata per la calibrazione automatica del robot.
4.È necessario disporre di driver robotici compatibili per il controller del robot.
5.Installi l'applicazione RoboDK TwinTool:
a.Scarichi l'App RoboDK TwinTool (contatti RoboDK per un link di download).
b.Clicchi due volte sul file per installare l'applicazione e aprirla in RoboDK.
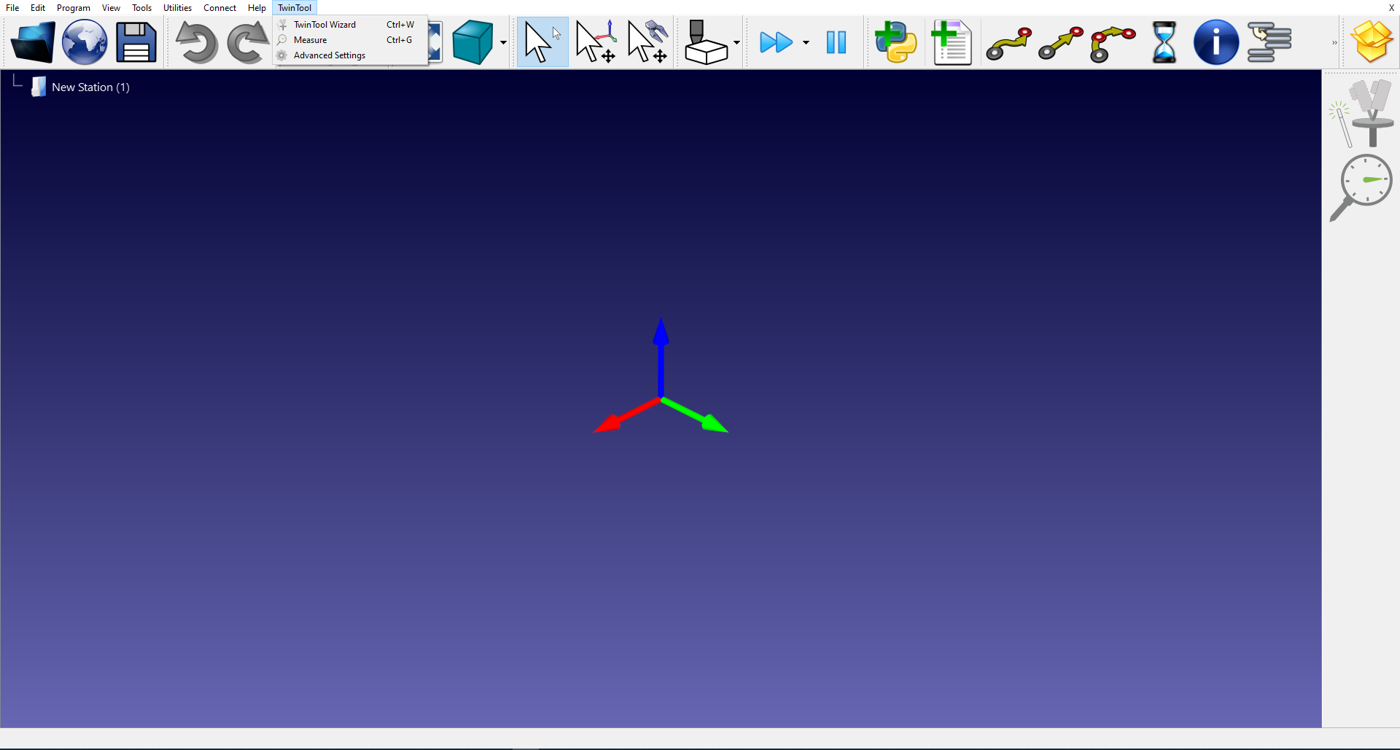
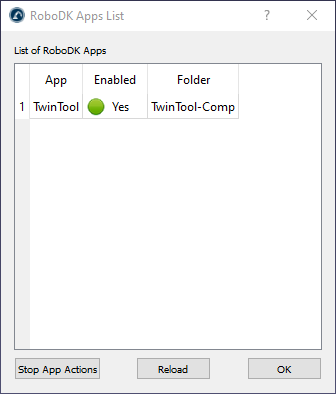
c.Selezioni Strumenti➔ Apps e faccia doppio clic su TwinTool per visualizzare la barra degli strumenti e il menu di TwinTool
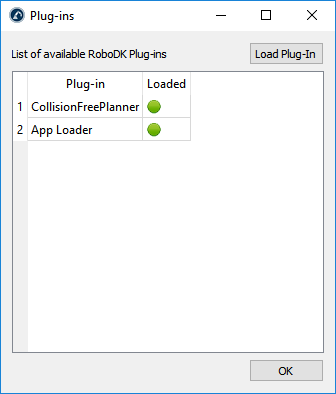
Se non riesce a visualizzare l'applicazione TwinTool, deve chiudere RoboDK e avviare nuovamente RoboDK con privilegi di amministratore per installare correttamente l'applicazione.