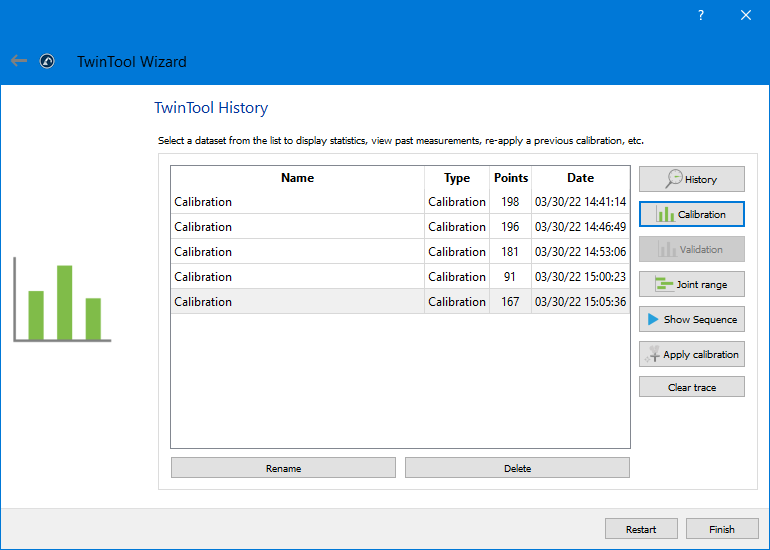
Al termine della sequenza di calibrazione, verrà indirizzato alla scheda Analizza della procedura guidata. Da qui può visualizzare le calibrazioni e le convalide attuali e precedenti, cancellare o riapplicare le calibrazioni e altro ancora.
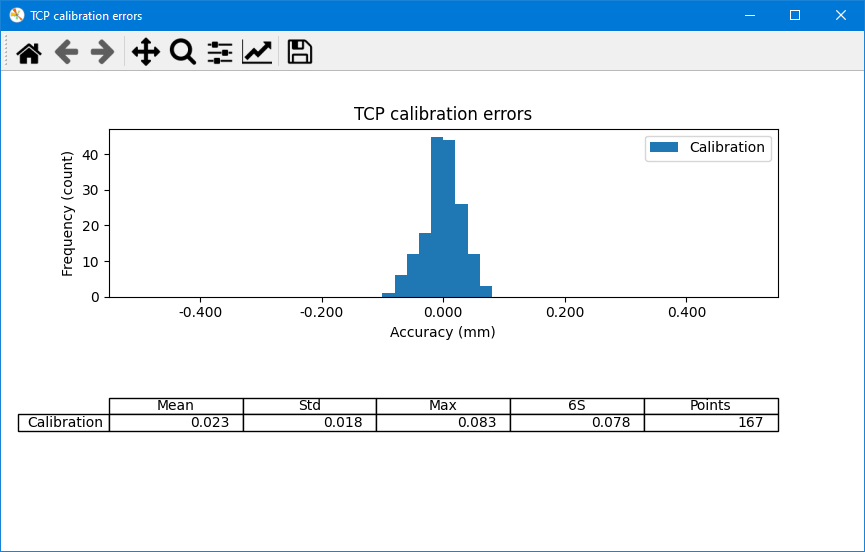
Cliccando sul pulsante Calibrazione, vedrà un grafico che mostra i risultati della calibrazione. Il punto centrale dell'utensile (TCP) viene calcolato utilizzando la cinematica nominale del robot.
Nota: selezionare TwinTool➔ TwinTool Wizard per ricominciare la sequenza di calibrazione con una serie diversa di punti (il sensore non deve essere spostato).
Suggerimento: se vuole ottenere i migliori risultati di precisione, è importante calibrare l'utensile con diverse configurazioni del robot. Ad esempio, se prima esegue una sequenza di calibrazione con il robot in posizione di capovolgimento (Giunto 5 negativo), può apprendere un nuovo bersaglio con una posizione non di capovolgimento (Giunto 5 positivo) ed eseguire nuovamente la sequenza di calibrazione.