Validazione
Una volta eseguita la sequenza di calibrazione, può eseguire alcuni test di convalida. Questi test di convalida possono essere effettuati nella stessa posizione del sensore o in posizioni diverse.
Importante: non è possibile combinare più sequenze di calibrazione eseguite in posizioni diverse del calibro lineare. Può calibrare il robot più di una volta nella stessa posizione e tutti i dati raccolti nella stessa posizione del sensore saranno utilizzati per la calibrazione.
Convalida la calibrazione dell'utensile
Selezioni

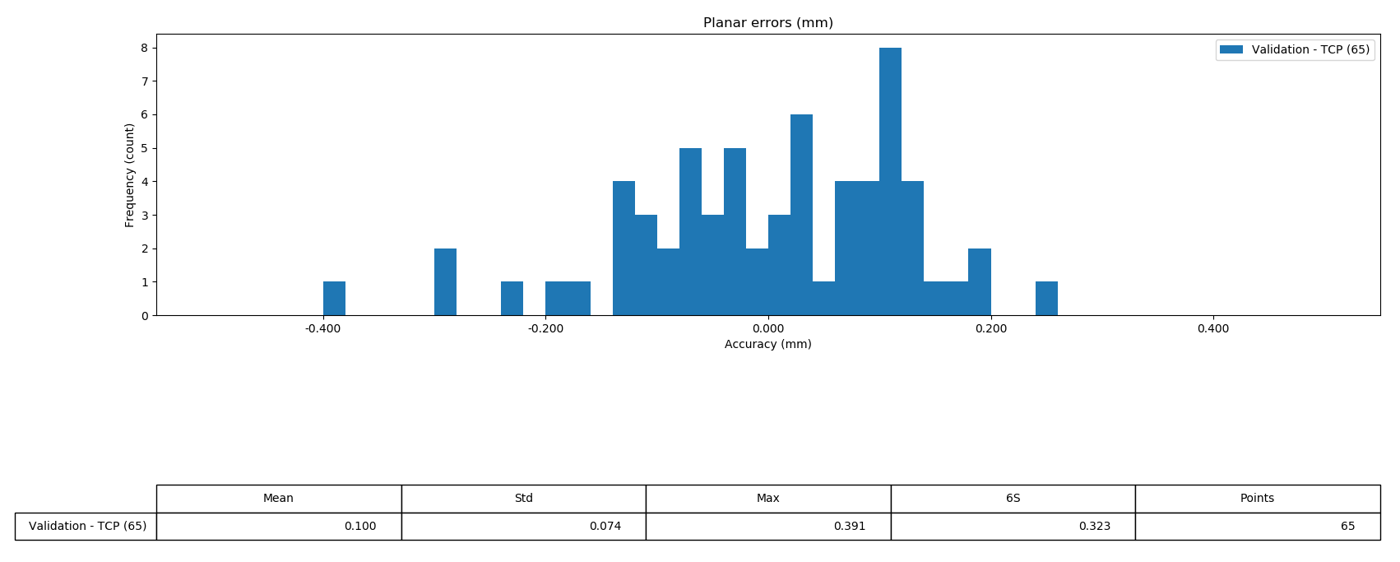
Selezionare Convalida per visualizzare un riepilogo e alcune statistiche sui risultati. Queste statistiche corrispondono agli errori planari rilevati dal sensore.
Suggerimento: effettuare più misurazioni per la calibrazione può migliorare notevolmente i risultati della calibrazione. Può cambiare la misura del bersaglio del sensore (ad esempio, utilizzare un bersaglio di 8 mm dopo il bersaglio predefinito di 4 mm per una seconda calibrazione). Può anche cambiare la configurazione del robot per effettuare misurazioni sullo stesso punto ma con angoli di articolazione diversi (ad esempio, utilizzando le configurazioni flip e non-flip).