RoboDK TwinTool
Introduzione
Con la calibrazione RoboDK TwinTool può calibrare automaticamente il punto centrale dell'utensile (TCP). I robot industriali sono altamente ripetibili, ma non precisi. Pertanto, l'accuratezza di un robot industriale può essere migliorata attraverso la calibrazione del robot e dell'utensile. Senza calibrazione, l'accuratezza del robot dipende molto dalla marca e dal modello del robot.
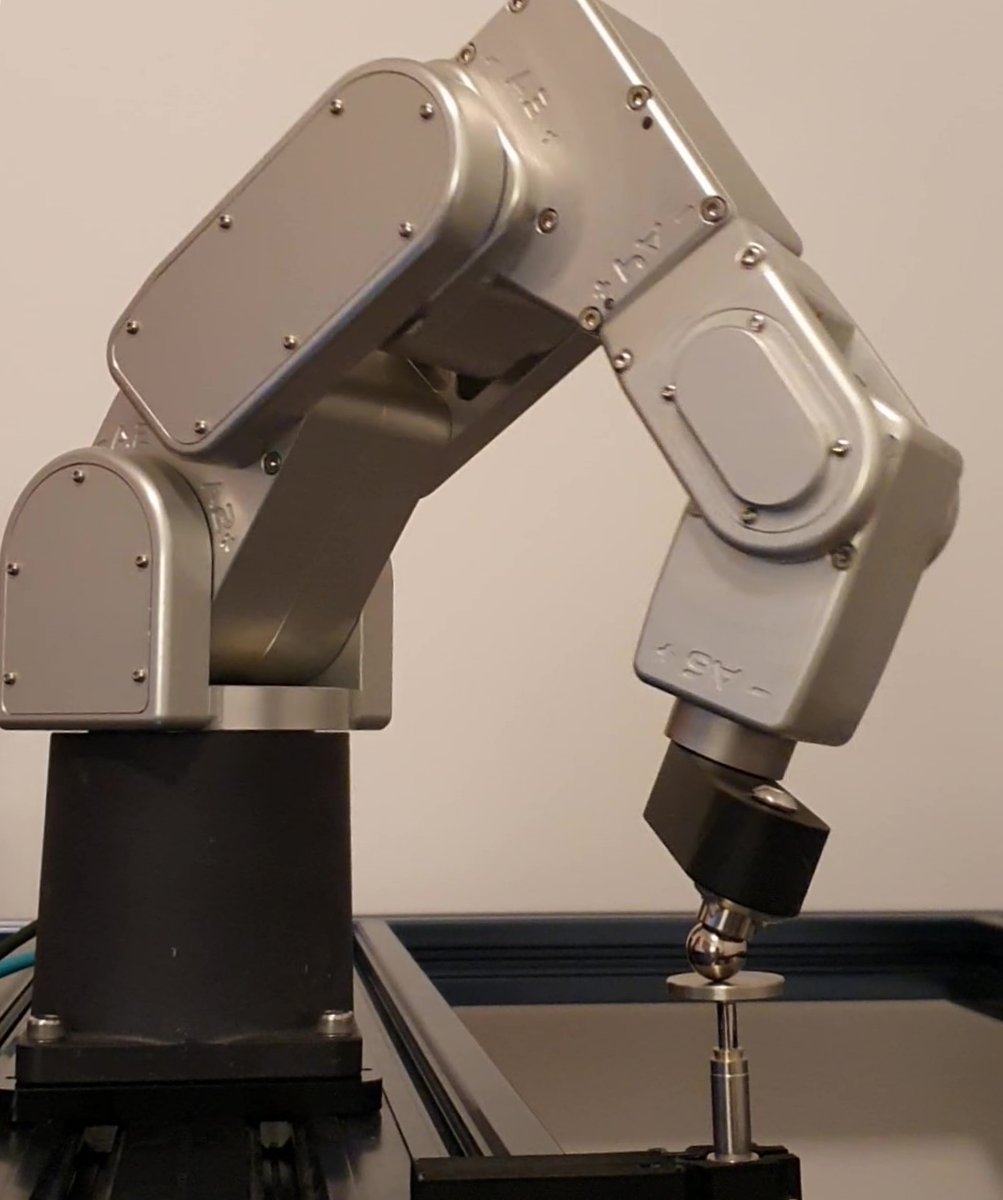

RoboDK TwinTool può essere utilizzato per calibrare e convalidare il punto centrale dell'utensile (TCP) . TwinTool può calibrare con precisione il TCP per gli utensili con geometrie sferiche o coniche.
1.Utensili sferici➔ Il centro dell'utensile è calibrato
2.Utensili conici➔ La punta dell'utensile è calibrata
Requisiti
Deve installare l'App RoboDK TwinTool e disporre di un sensore compatibile per eseguire la calibrazione automatica dello strumento.
Si assicuri di avere i seguenti elementi:
1.Uno o più bracci robotici.
2.Un comparatore compatibile (noto anche come LVDT o calibro lineare).
3.Il software RoboDK deve essere installato e deve essere disponibile una licenza appropriata per la calibrazione automatica del robot.
4.È necessario disporre di driver robotici compatibili per il controller del robot.
5.Installi l'applicazione RoboDK TwinTool:
a.Scarichi l'App RoboDK TwinTool (contatti RoboDK per un link di download).
b.Clicchi due volte sul file per installare l'applicazione e aprirla in RoboDK.
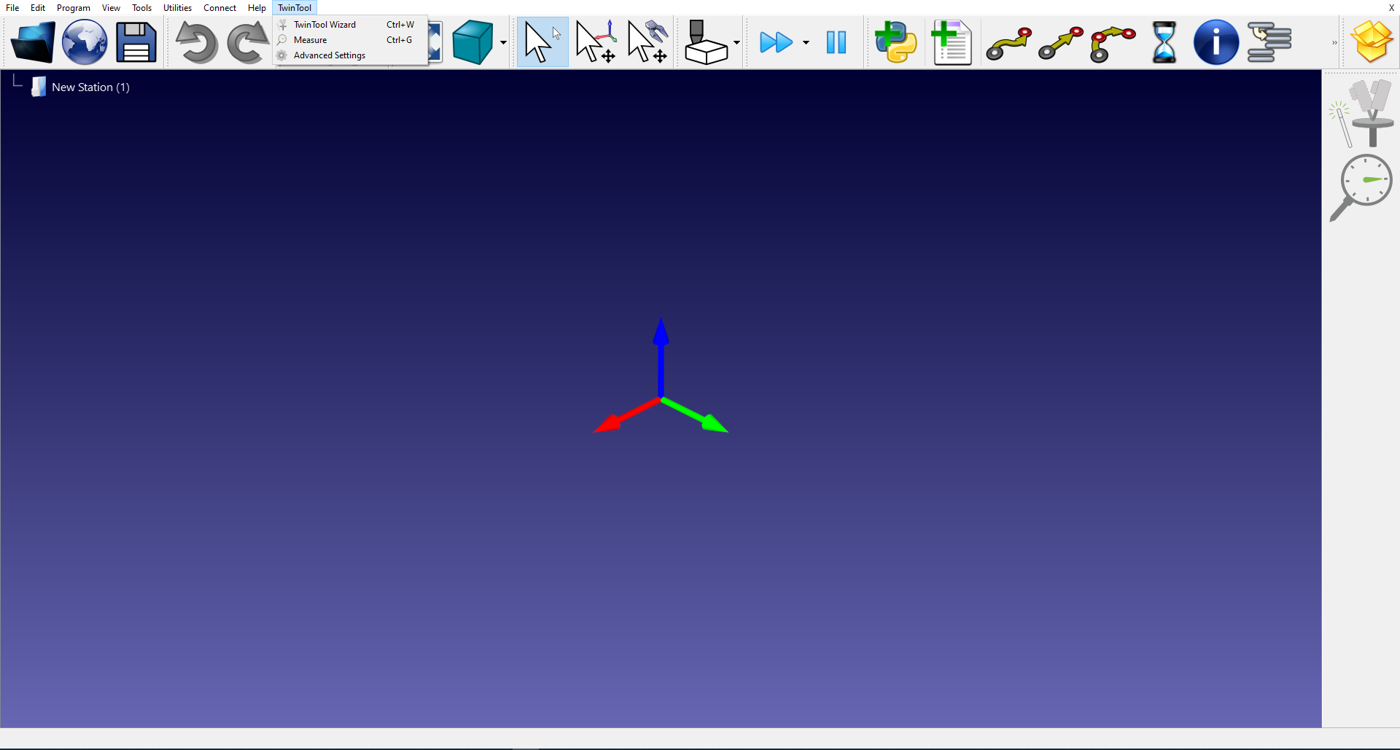
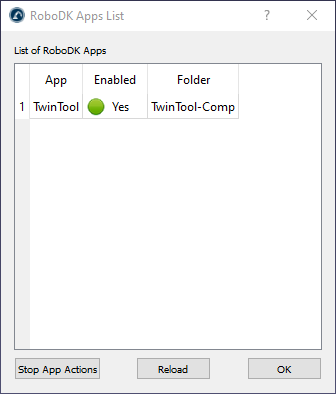
c.Selezioni Strumenti➔ Apps e faccia doppio clic su TwinTool per visualizzare la barra degli strumenti e il menu di TwinTool
Se non riesce a visualizzare l'applicazione TwinTool, deve chiudere RoboDK e avviare nuovamente RoboDK con privilegi di amministratore per installare correttamente l'applicazione.
Sensore di misura lineare
RoboDK TwinTool supporta diversi sensori di misura lineare, tra cui Keyence, Mitutoyo, Sylvac e altri. Alcuni protocolli di comunicazione includono USB, Ehternet/IP e RS232. Un prezzo approssimativo per un sensore di calibro lineare di livello industriale è di 1.500,00 euro.
Il sensore di misura lineare deve avere una precisione di 0,005 mm o superiore e una corsa di 10 mm o più. Si raccomanda una frequenza di misurazione di 50 campioni al secondo o più. Questo sensore non è fornito o venduto da RoboDK. Si consiglia di contattare il distributore locale per la fornitura del sensore necessario all'utilizzo di RoboDK TwinTool.
L'elenco seguente mostra un esempio di ordine per un calibro lineare Keyence:
●Keyence GT2-P12 - Calibro a matita
●GT2-UB1 - Unità di connessione USB
●OP-87716 - Prolunga del cavo
●OP-76875 - Staffa di montaggio suggerita per il calibro
●È necessario un punto di contatto piatto da 25 mm con filettatura M2.5x0.25 (non fornito da Keyence).
L'elenco seguente mostra un esempio di ordine per un calibro lineare Mitutoyo:
●Mitutoyo 542-191 - Calibro LG 100
●Mitutoyo 542-081A - Contatore EJ + AC
●Mitutoyo 21HZA149 - Interfaccia USB (è supportata anche la RS232)
●È necessario un punto di contatto piatto da 25 mm con filettatura M2.5x0.25 (non fornito da Mitutoyo).
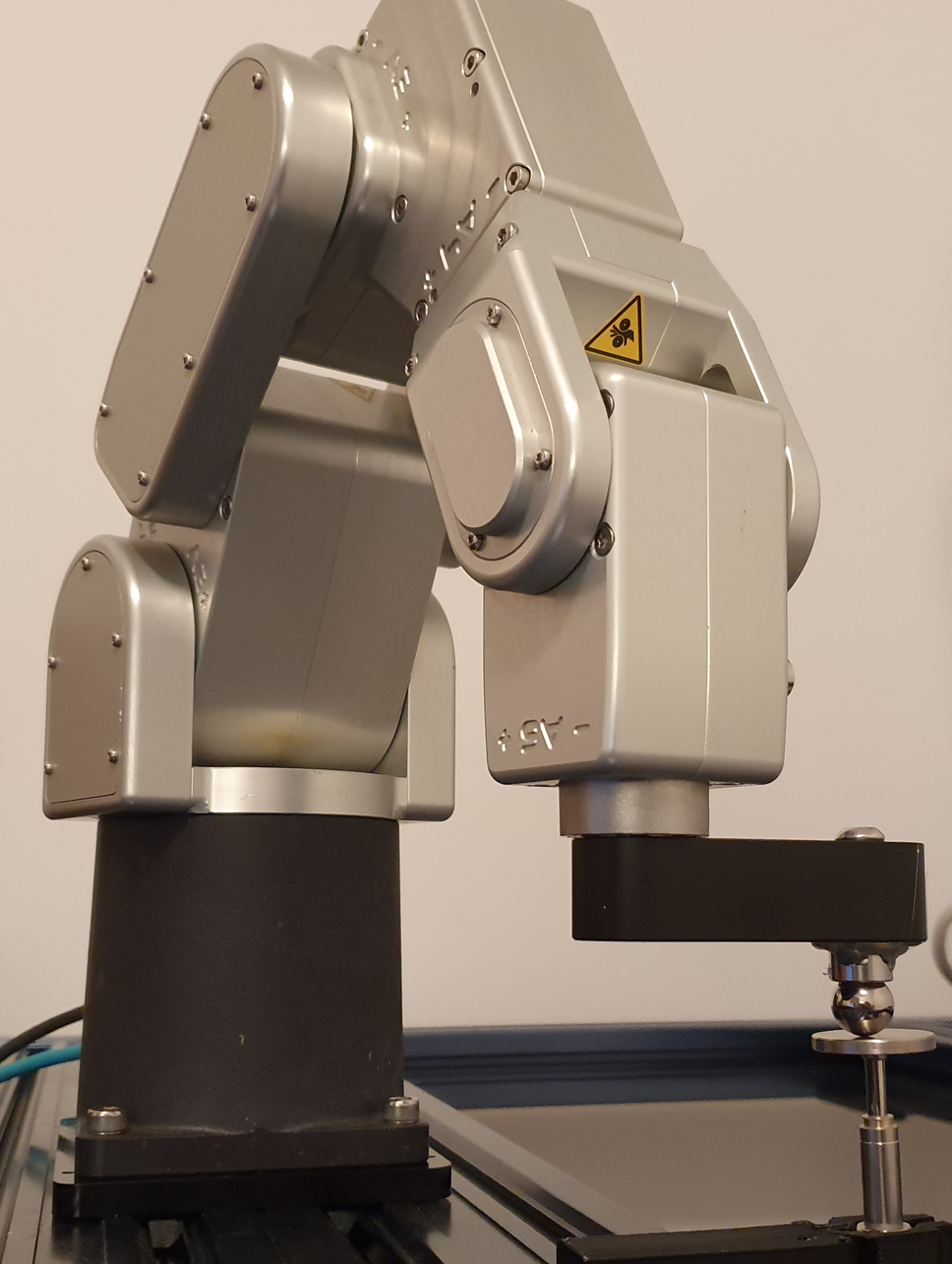
Impostazione della calibrazione
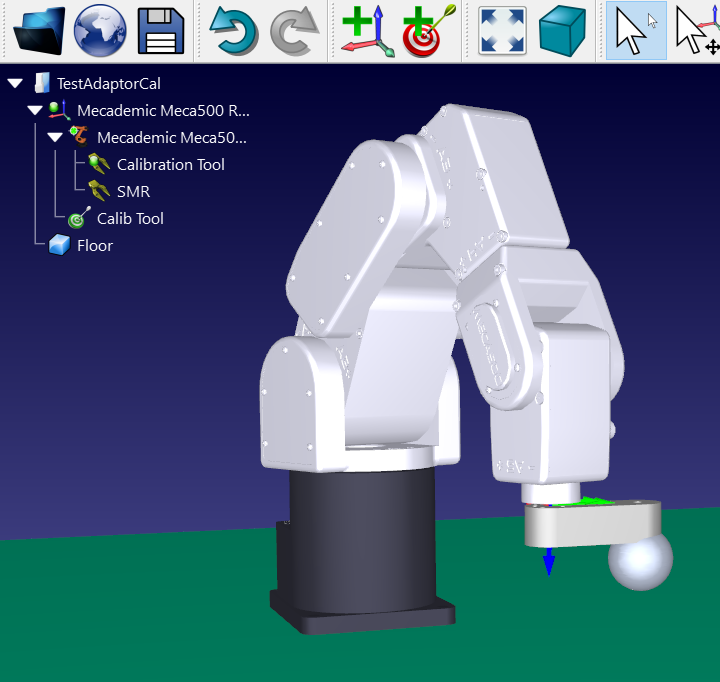
Per calibrare l'utensile (TCP) con TwinTool, deve caricare il robot in RoboDK e assicurarsi che il sensore e il robot siano collegati. Può opzionalmente modellare la cella aggiungendo i modelli 3D degli oggetti e degli utensili. Questo permetterà di evitare automaticamente le collisioni.
1.Caricare il robot:
a.Selezioni File➔ Aprire la libreria online. La libreria online verrà visualizzata in RoboDK.
b.Utilizzi i filtri per trovare il suo robot.
c.Selezioni Apri per caricare automaticamente il robot nella sua stazione RoboDK.
d.In alternativa, scarichi il file del robot direttamente dalla libreria (https://robodk.com/library) e apra il file con RoboDK (il file .robot).
2.Colleghi il sensore:
a.Colleghi il sensore al computer.
b.Selezioni TwinTool➔
c.Si assicuri che il sensore stia misurando e che le misurazioni siano stabili.
3.Colleghi il robot:
a.Selezioni Collegare➔ Collegare il robot.
b.Inserisca l'IP e la porta del robot.
c.Selezionare Connetti.
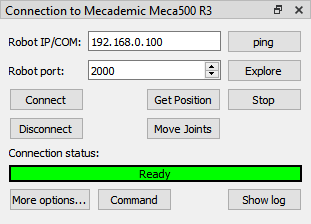
4.Selezioni Ottieni posizione dal pannello di connessione del robot. Questo passaggio aggiornerà la posizione del robot in RoboDK.
Configurazione personalizzata
Può seguire facoltativamente questi passaggi per modellare correttamente l'ambiente 3D della sua cella.
1.Carichi il modello 3D del suo utensile e crei un utensile in RoboDK. Maggiori informazioni nella sezione Crea utensile.
2.Carichi qualsiasi file 3D per modellare la cella. Può caricare file 3D STEP, IGES, STL. Maggiori informazioni nella sezione "Iniziare".
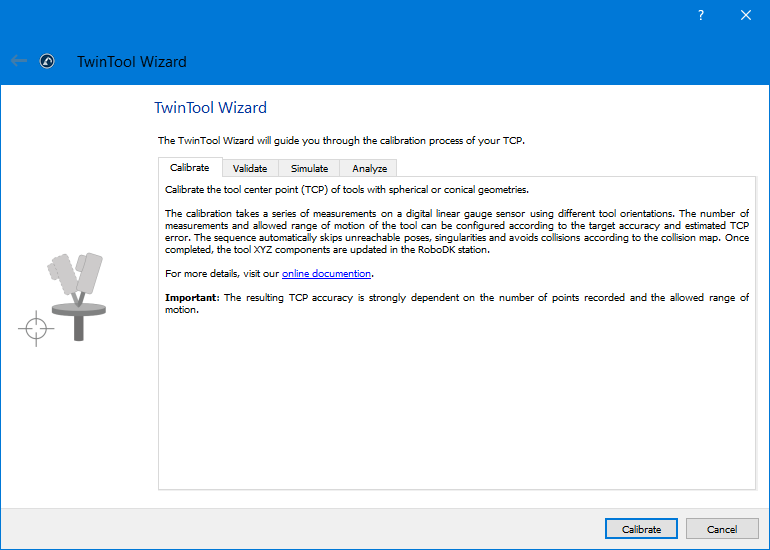
Calibrazione guidata
Per avviare la procedura di calibrazione, basta selezionare TwinTool➔
Dopo aver lanciato la procedura guidata, sarà guidato attraverso le configurazioni


Risultati della calibrazione
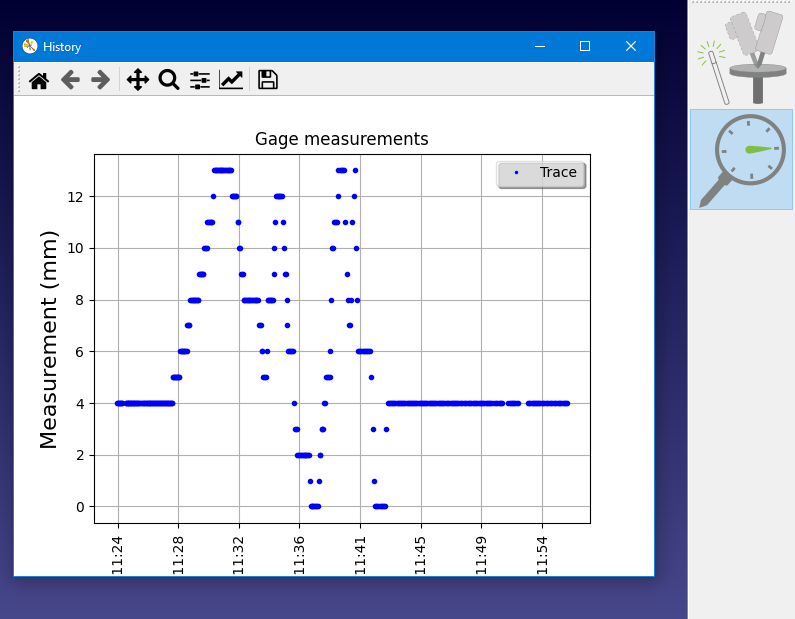
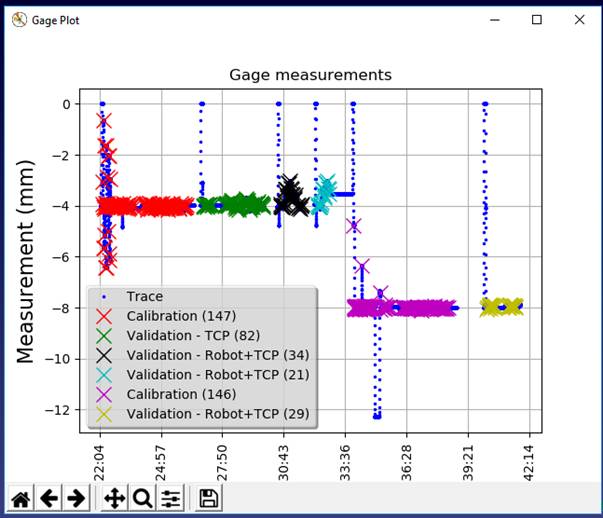
Al termine della sequenza di calibrazione, verrà indirizzato alla scheda
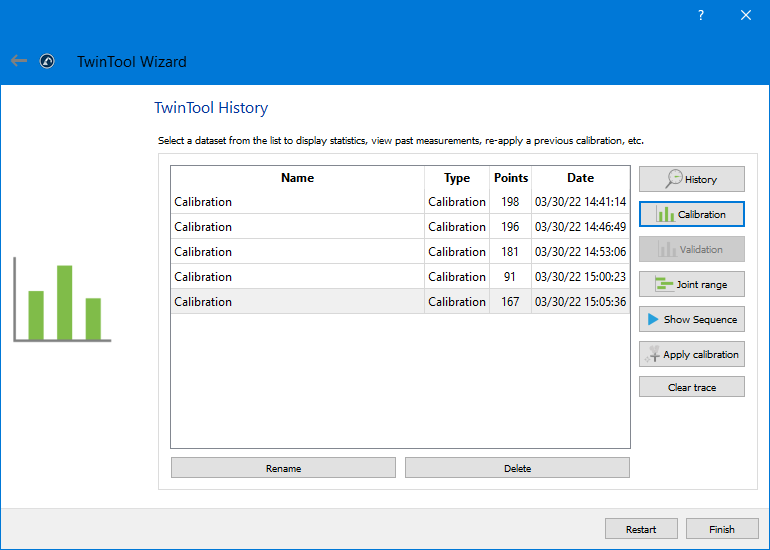
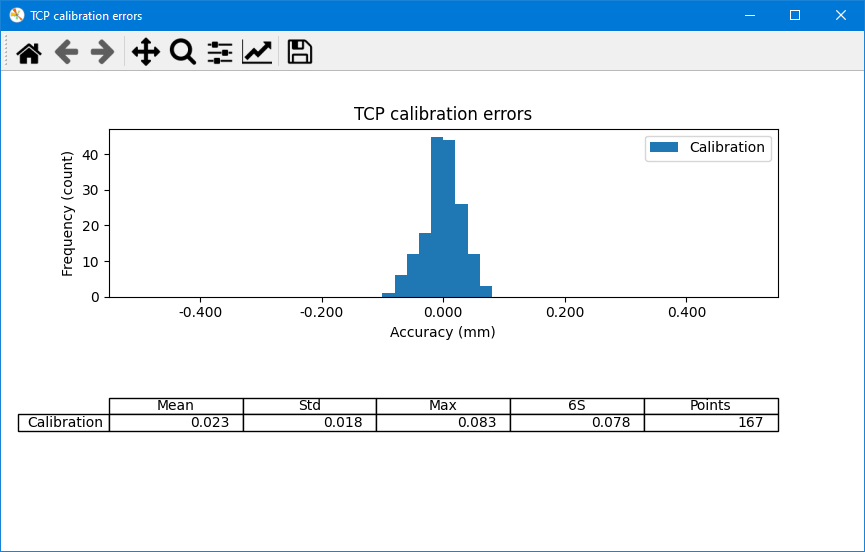
Cliccando sul pulsante Calibrazione, vedrà un grafico che mostra i risultati della calibrazione. Il punto centrale dell'utensile (TCP) viene calcolato utilizzando la cinematica nominale del robot.
Validazione
Una volta eseguita la sequenza di calibrazione, può eseguire alcuni test di convalida. Questi test di convalida possono essere effettuati nella stessa posizione del sensore o in posizioni diverse.
Convalida la calibrazione dell'utensile
Selezioni
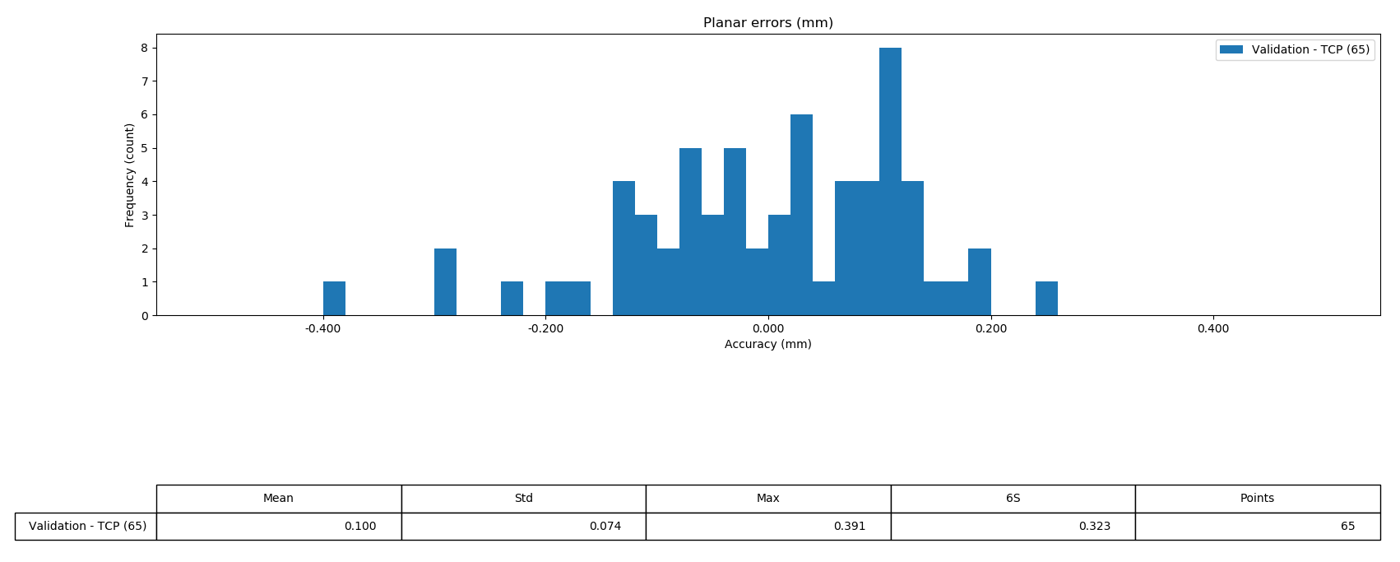
Selezionare Convalida per visualizzare un riepilogo e alcune statistiche sui risultati. Queste statistiche corrispondono agli errori planari rilevati dal sensore.
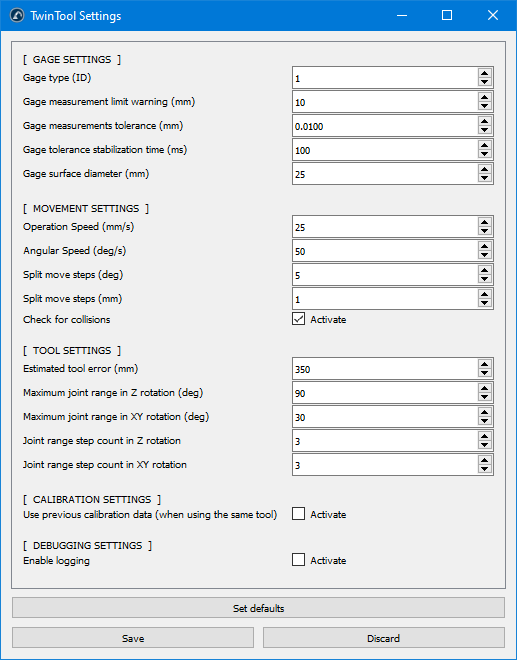
Impostazioni
Questa sezione descrive le impostazioni e le opzioni aggiuntive che può modificare per personalizzare meglio le calibrazioni e testare la precisione del robot.
Impostazioni di calibrazione
Selezioni TwinTool➔ Impostazioni avanzate per aprire l'elenco completo delle impostazioni avanzate. La maggior parte di queste impostazioni viene richiesta e impostata attraverso la procedura guidata.