Calibrazione Robot
La calibrazione robot è divisa in 4 passaggi. Ogni passaggio richiede di ottenere un set di misurazioni. Questi quattro step devono essere seguiti in ordine:
1.Misurazioni riferimento base (3 minuti)
2.Minurazioni riferimento tool (3 minuti)
3.Misurazioni calibrazione (7 minuti, 60 misurazioni)
4.Misurazioni di validazione (7 minuti, 60 misurazioni)
Il seguente video mostra come eseguire questa calibrazione in 20 minuti: https://youtu.be/Htpx-p7tmYs. La validazione non è obbligatoria per calibrare il robot, tuttavia fornisce un punto di vista oggettivo sull'accuratezza dei risultati. È anche possibile vedere l'impatto della calibrazione del robot in un'area e validarla in una differente.
Seleziona il pulsante Misura per ognuno dei quattro set di misurazioni. Ciò aprirà una nuova finestra che permette di ottenere nuove misurazioni così come importare e esportare misurazioni in un file di testo (formati csv o txt)
Misurare la base
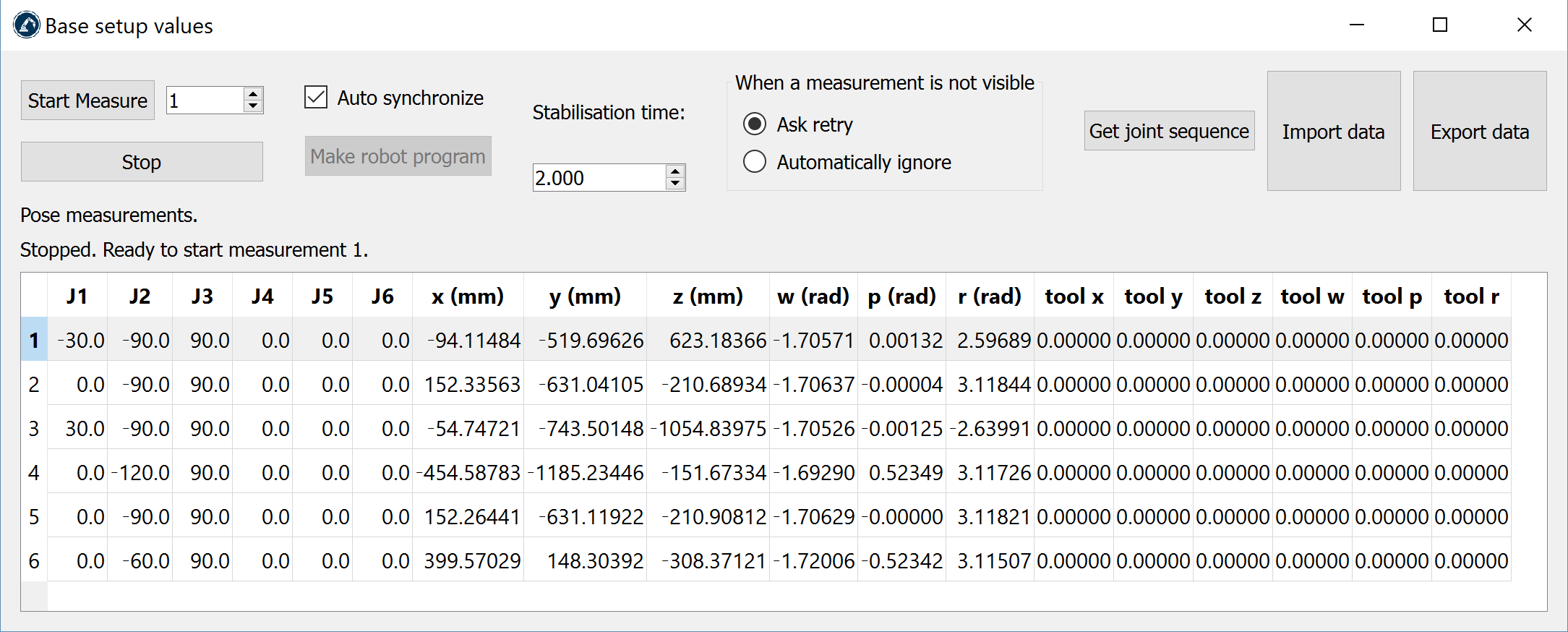
Queste misurazioni possono essere eseguite ovunque nella flangia del tool se vogliamo misurare lo stesso bersaglio per tutte e sei le misurazioni. Per iniziare le misurazioni seleziona Misura nella seziona Setup base. La seguente finestra comparirà. Poi, seleziona Inizia Misura e il robot si muoverà sequenzialmente lungo le misurazioni programmate.
Chiudi la finestra quando le misurazioni sono completate e il Riferimento misurazioni è stato aggiornato con rispetto della base del robot. Se non abbiamo selezionato nessun piano di riferimento, possiamo aggiungerne uno e poizionarlo sotto la base del robot trascinandolo.
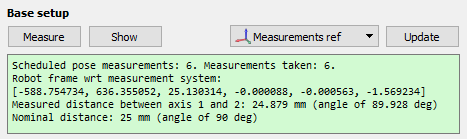
Il resoconto mostrerà la posizione e l'orientamento del riferimento del robot con rispetto del riferimento calibrazione (formato [x,y,z,w,p,r] in mm e radianti).
Una volta che questo step è completato possiamo visualizzare lo spazio di lavoro del tracker con rispetto del robot in RoboDK in real time.
Misurare il tool
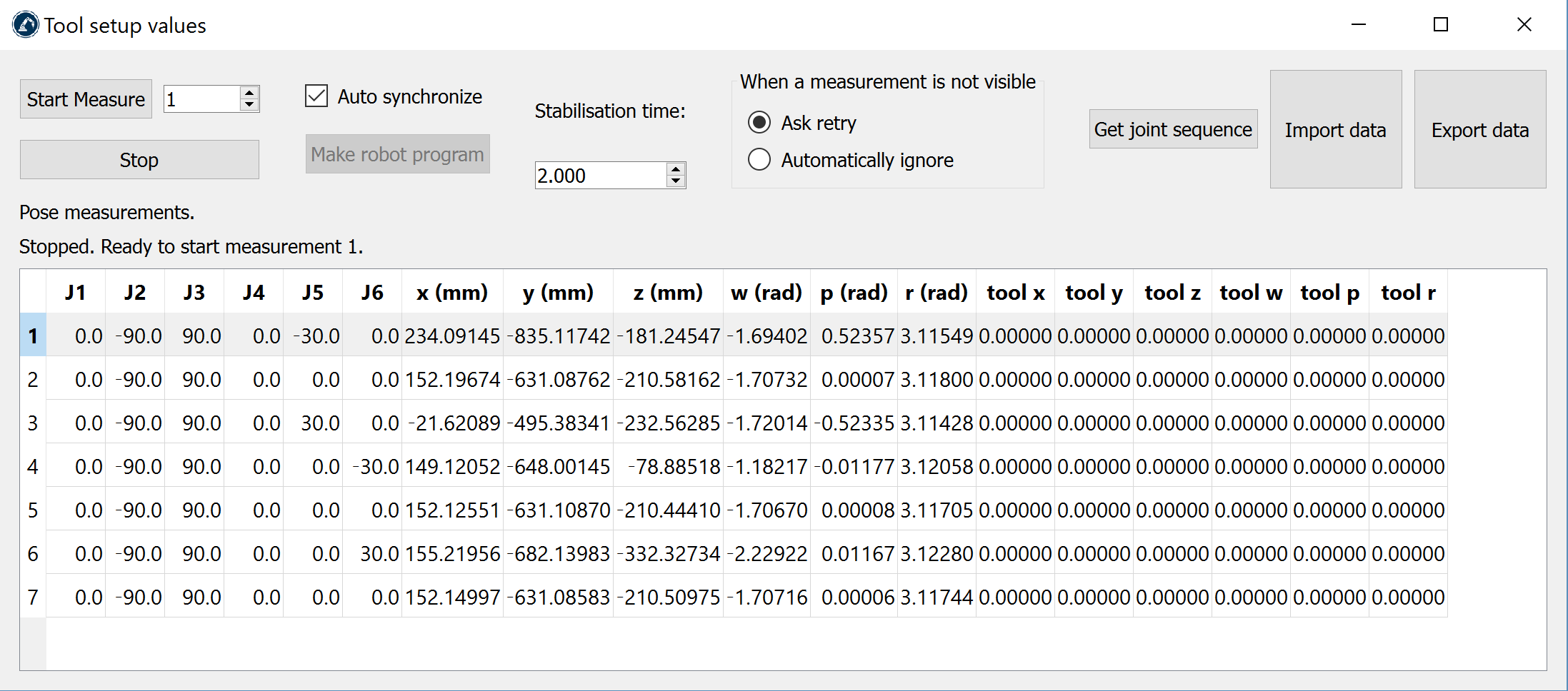
Come la precedente sezione: Per iniziare le misurazioni seleziona Misura nella seziona Setup base. La seguente finestra comparirà. Poi, seleziona Inizia Misura e il robot si muoverà sequenzialmente lungo le misurazioni programmate. Fai doppio click su una misurazione per continuare a misurare da quella posizione.
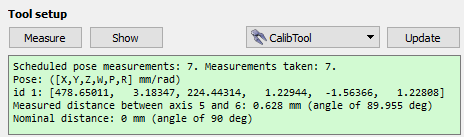
Il resoconto mostrerà il TCP calibrato (posizione e orientamento) quando la procedura è completata. La definizione del TCP (nella seguente immagine "Spindle") sarà aggiornata in automatico. Se non abbiamo selezionato nessun TCP, possiamo aggiungerne uno (seleziona Programmi➔Aggiungi Tool vuoto) e seleziona Ricalcola
Calibrazione
Seleziona Misura nella sezione Calibrazione. La seguente finestra comparirà. Poi, seleziona Inizia Misura e il robot si muoverà sequenzialmente tra le misurazioni pianificate. Fai doppio click su una misurazione per continuare da quella posizione.
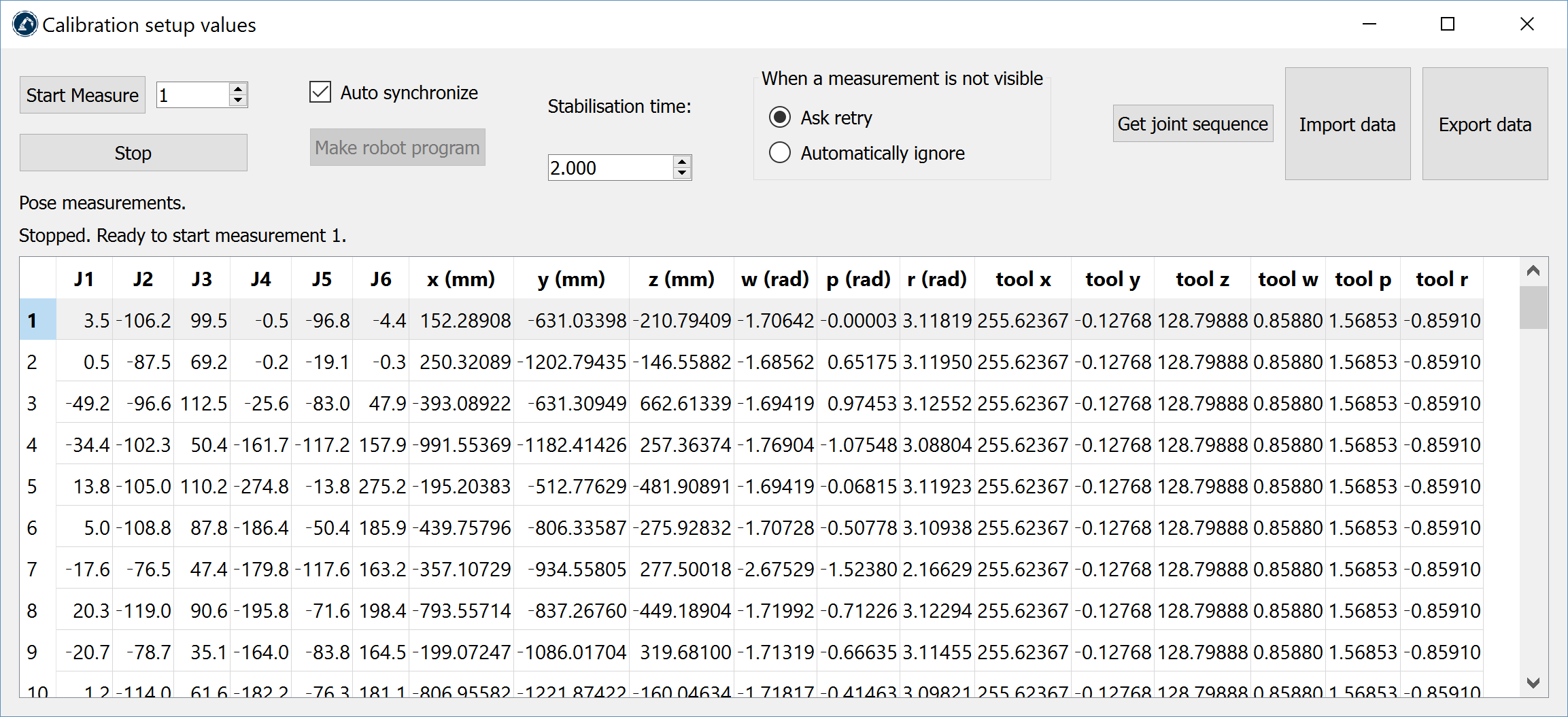
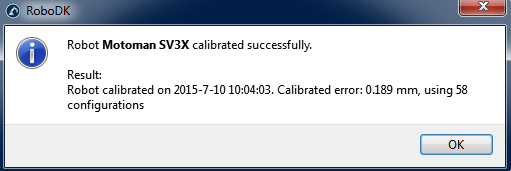
Chiudi la finestra quando la misurazione è completata. Il robot sarà calibrato automaticamente e mostrerà il seguente messaggio se non ci sono stati errori.
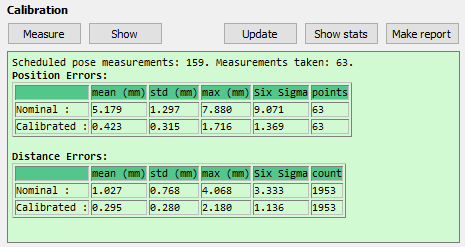
Infine, la schermata verde mostrerà alcune statistiche riguardanti le misurazioni di calibrazione e quanta accuratezza è stata migliorata per quelle misurazioni.
Validazione
Non dovremmo validare l'accuratezza robot utilizzando le stesse misurazioni che abbiamo utilizzato per calibrarlo, dunque, è raccomandato prendere misure addizionali per validarne l'accuratezza (avere più punti di vista oggettivi del risultato dell'accuratezza).
La stessa procedura di calibrazione deve essere seguita per prendere misurazioni di validazione. Il resoconto mostrerà le statistiche di validazione. Leggere la prossima Sezione Risultati per più informazioni.