Connessione al robot
L'IP del robot (o la porta COM per connessioni RS232) è necessario per impostare la comunicazione con RoboDK. Segui questi passaggi per verificare la connessione al robot:
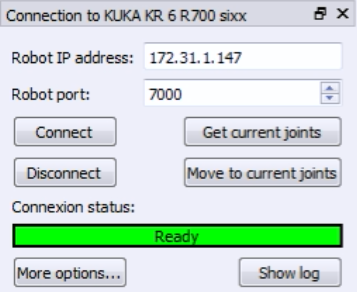
1.Seleziona Connetti➔Connetti robot. Una nuova finestra apparirà.
2.Imposta l'IP e la porta del robot (o la porta COM)
3.Clicca il pulsante Connetti
4.Riferisci all'Appendix I se incorri in qualche problema
Se la connessione è avvenuta dovresti vedere un messaggio verde che mostra Ready. La posizione del robot virtuale dovremme corrispondere alla posizione del robot reale se selezioniamo Ottieni giunti correnti. In alternativa, selezioniamo Muovi su giunti correnti per muovere il robot nella posizione corrente nel simulatore. La finestra può esser chiusa e la connessione rimane attiva.