Connettersi al tracker robot
L'IP del tracker è richiesto per impostare propriamente la comunicazione in RoboDK. Assicurati che VXelements non sia avviato e segui questi passaggi per verificare la comunicazione con il tracker:
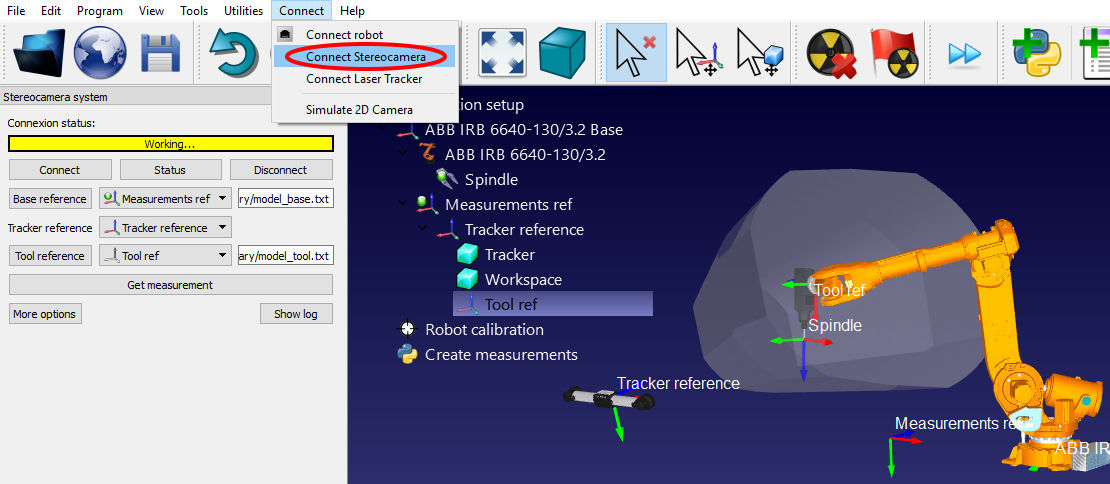
a.Seleziona il menu Connetti➔Connetti Stereocamer. Una nuova finestra dovrebbe aprirsi.
b.Immetti il modello base e il modello tool come file di testo (generati nella precedente sezione)
Questi sono posizioni dei bersagli che definiscono il piano di riferimento e il piano del tool rispettivamente.
c.Seleziona il pulsante Connetti
d.Quando la connessione è avvenuta, dobbiamo fornire il modello della base e del tool come file di testo (.txt)
Vedrai che una versione integrata di VXelements si avvierà e, dopo alcuni secondi, dovresti vedere un messaggio verde che mostra "Ready" se la connessione è stata un successo. La finestra di VXelements può esser chiusa e la connessione rimarrà attiva. Se la connessione non sarà un successo dobbiamo assicurarci che nessun processo VXelements sia attivo dalla Task bar di Windows o dal Task manager (seleziona CTRL+ALT+DEL per forzare lo stop del processo VXelementsApiImplementation) poi, seleziona Connetti in RoboDK per riprovare.