Introduzione
Robot industriali sono altamente ripetitivi ma non accurati, dunque, l'accuratezza di un robot industriale può essere migliorata tramite la calibrazione. L'accuratezza nominale di un robot dipende dalla marca e dal modello, come anche quanto può essere migliorata. Dopo la calibrazione robot, l'accuratezza può essere migliorata di un fattore da 2 a 10 o più.
Opzionalmente, un ballbar test (test circolare) o un test ISO9283 di accuratezza percorso può essere eseguito per validare velocemente l'accuratezza del robot.
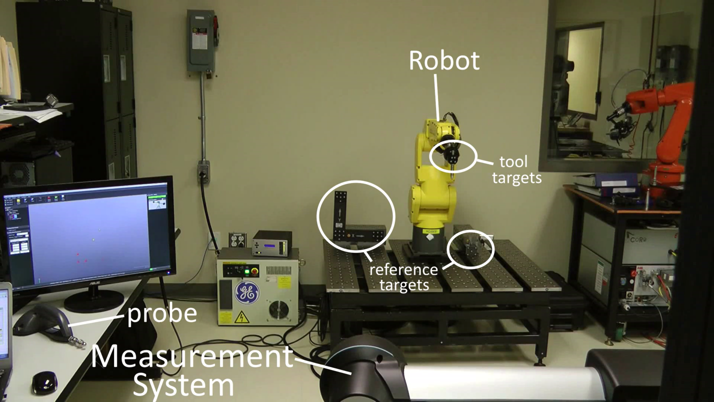
Un sistema di misurazione è richiesto per calibrare il rovot. RoboDK può essere usato per calibrare i robot come anche per generare programmi accurati (ciò include filtrare i programmi e utilizzare il motore di programmazione offline di RoboDK). RoboDK può anche essere usato per testare l'accuratezza del robot prima e dopo la calibrazione attraverso il ballbar test o una fresatura.
La calibrazione robot può migliorare notevolmente l'accuratezza dei robot programmati offline, anche conosciuta come Programmazione Offline (OLP). Un robot calibrato ha un maggior posizionamento assoluto e relativo di uno non calibrato.
È raccomandato guardare il seguente video per vedere una calibrazione completa di un robot industriale utilizzando RoboDK: https://robodk.com/robot-calibration#tab-ct