Mastering Robot
Una volta che il robot è stato calibrato, solitamente abbiamo bisogno che RoboDK filtri i programmi, dunque, una licenza RoboDK è richiesta (una licenza base di OLP va bene per generare programmi robot una volta che è stato calibrato). Filtrare un programma signidica che i bersagli in un programma sono alterati/ottimizzati per migliorare l'accuratezza del robot, prendendo in considerazione tutti i parametri di calibrazione (circa 30).
In alternativa, possiamo calibrare solo l'offset giunti più il riferimento di base e tool (4 parametri di offset giunti più sei parametri per il piano della base più sei parametri per il piano del tool). La calibrazione non sarà così accurata come se usassimo la calibrazione completa ma permette di immettere certi parametri nel controller robot non dipendenti da RoboDK nella generazione dei programmi.
Per ottenere la calibrazione solo per l'offset dei giunti dobbiamo selezionare Calib. Param. poi il pulsante Mastering (dentro il menu calibrazione robot).
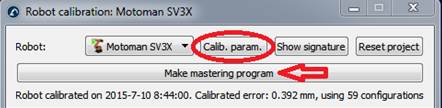

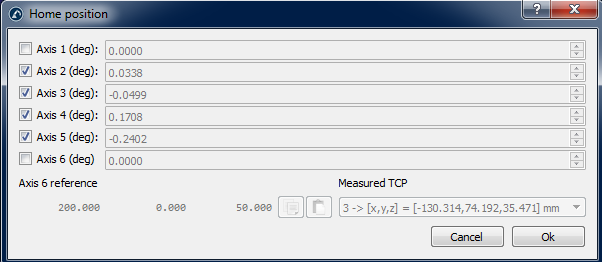
Una nuova finestra comparirà dopo che abbiam selezionato Crea programma mastering. In questa finestra possiamo selezionare quali assi vogliamo prender in considerazione per creare una nuova posizione di home.
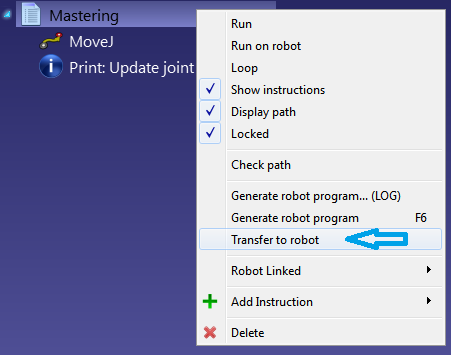
Il pulsante Crea programma mastering apparirà nella finestra calibrazione robot. Seleziona questo pulsante per generare il programma che porterà il robot nella nuova posizione di home. Trasferiscilo al robot ed eseguilo, poi, una nuova posizione home deve esser registrata.
Se il robot e il PC sono connessi, possiamo fare click con il tasto destro sul programma e Inviare Programma al Robot per mandare automaticamente il programma al robot. In alternativa, possiamo selezionare Genera Programma Robot per vedere i nuovi valori giunti per la posizione home.