Misurare i piani di riferimento
Prima, due modelli sono richiesti: un modello del robot e un modello del riferimento della base. Un modello è un oggetto definito come una lista di punti (coordinate X,Y,Z) corrispondenti ai bersagli con rispetto del modello di riferimento (tool o base). Possiamo opzionalmente usare un HandyProbe per posizionare il piano di riferimento quando desiderato.
Dobbiamo seguire questi passaggi due volte per definire i modelli di tool e base:
1.Inizia VXelements e connetti il tracker. Calibra il tracker come anche l'HandyProbe se richiesto.
2.Seleziona Tracking Models dall'albero a sinistra in VXelements e seleziona Detect model. Seleziona i bersagli che corrispondono al modello (tool o oggetto) e seleziona "Accetta".
Suggerimento: Tieni premuto CTRL per selezionare un gruppo di bersagli.

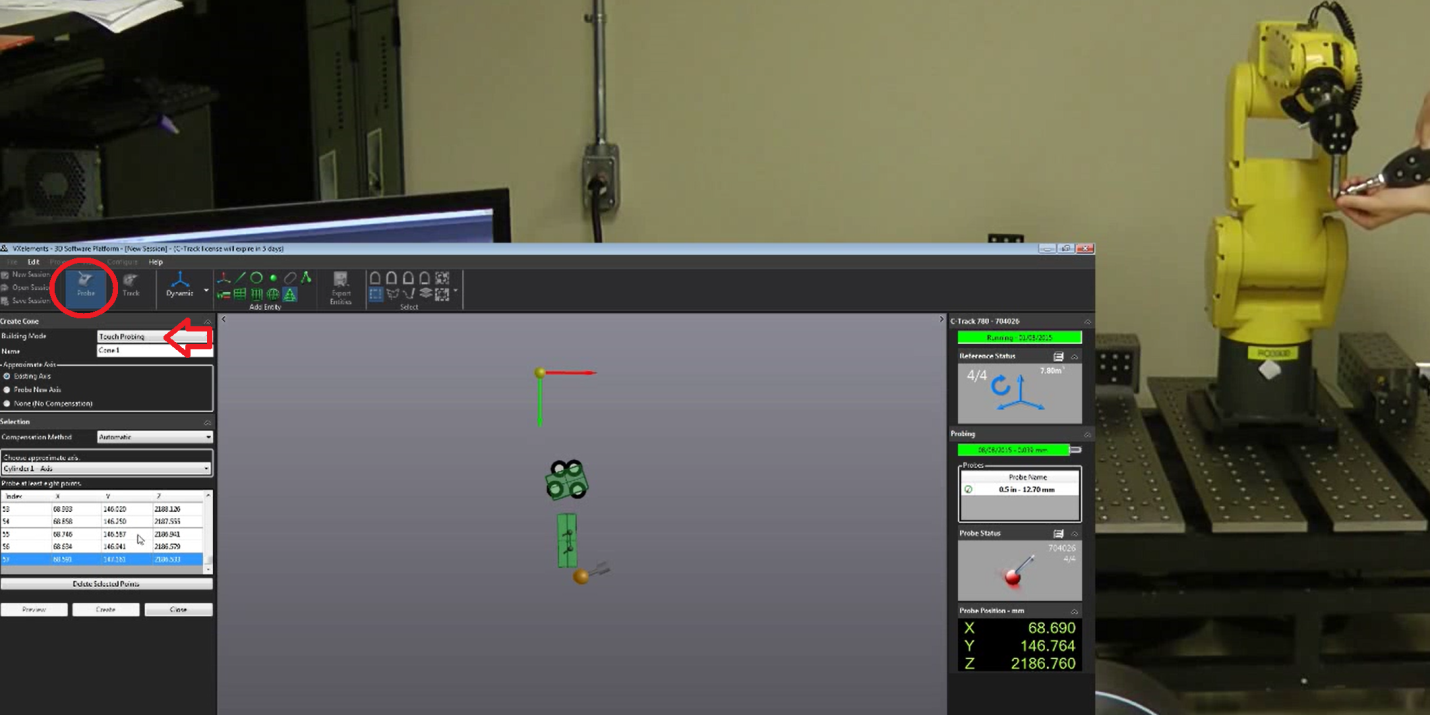
3.Il piano di riferimento dell'oggetto può essere posizionato ad una posizione specifica con rispetto di certe caratteristiche dell'oggetto. Questo passaggio è opzionale ma fortemente raccomandato se vogliamo posizionare il TCP accuratamente con rispetto della flangia. Per esempio possiamo posizionare accuratamente l'asse Z del tool lungo il riferimento del cilindro usato come mandrino.
Per muovere propriamente il piano di riferimento dell'oggetto dobbiamo usare l'HandyProbe e portare queste caratteristiche nel modello virtuale di VXelements. Il modello usato deve esser definito come un modello di posizionamento in modo che le features siano misurate con rispetto di questo modello. È anche possibile misurare punti, linee, piani, cilindri, conei e definire piani di riferimento con rispetto di queste caratteristiche.
Quando abbiamo terminato possiamo esportare il modello come file txt. Dovremmo vedere i bersagli nel file di testo come lista di punti XYZ.