Riferimento asse 6
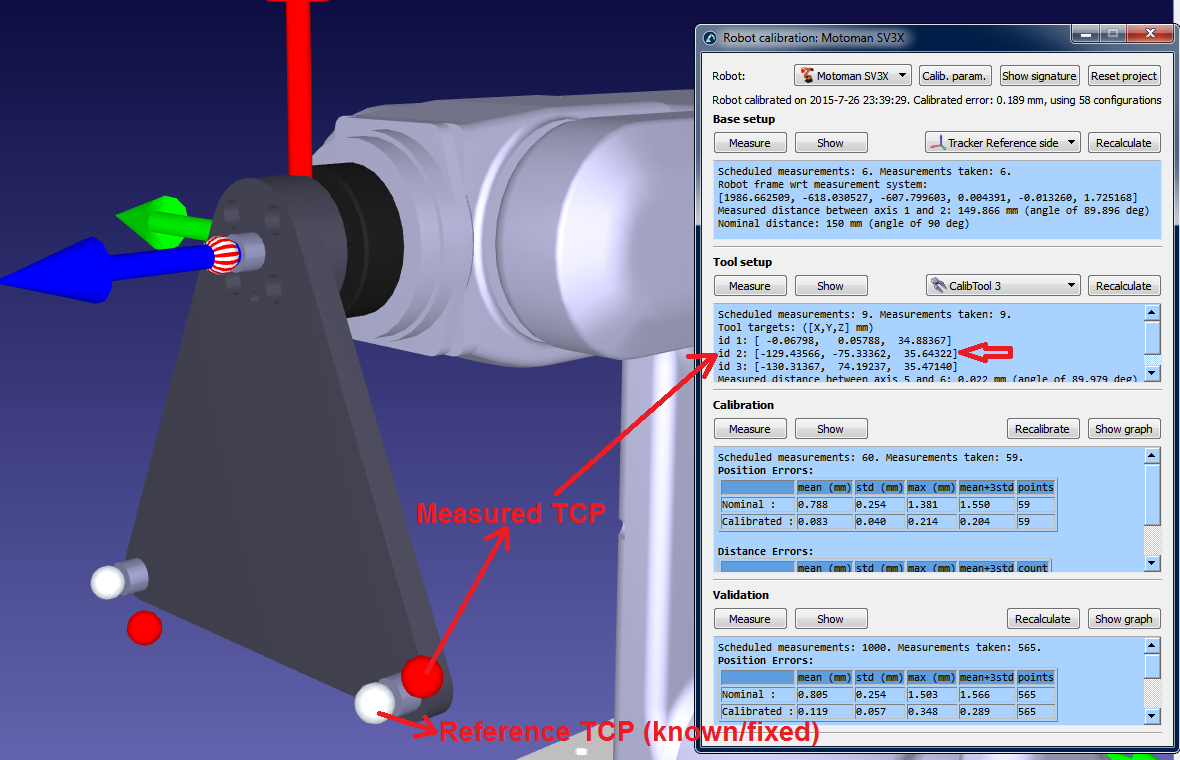
Dobbiamo usare un bersaglio di riferimento per impostare propriamente la posizione home dell'asse 6. L'angolo di offset sarà una rotazione attorno all'asse Z della flangia robot necessaria ad adattarsi al TCP misurato (X,Y,Z) con il riferimento conosciuto del TCP. Il TCP misurato (guarda la prossima immagine) è uno dei TCP misurati nel passaggio 2 di questa procedura. Il riferimento TCP è un riferimento conosciuto che corrisponde a uno dei TCP della calibrazione in uso.
Idealmente, il TCP di riferimento deve esser misurato dal CMM con rispetto della flangia tool (una replica della flangia robot sarebbe meglio). In alternativa, possiamo usare un nuovo robot per misurare (passaggio 2) il TCP per la prima volta e usare un TCP misurato come riferimento. È importante usare un dowel pin o un'appropriata flangia per assicurarsi che l'end effector sia sempre nella stessa posizione.