Risultati
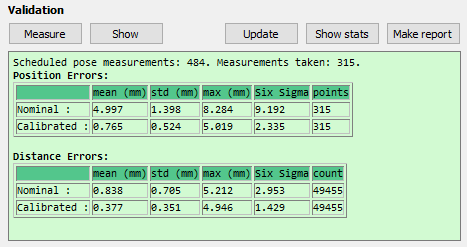
Una volta che la calibrazione è completa possiamo analizzare i miglioramenti nell'accuratezza leggendo le statistiche fornite da RoboDK. Per vedere queste statistiche, apri la finestra di calibrazione robot (facendo doppio click sull'icona Calibrazione Robot). La finestra di resoconto nella sezione validazione mostrerà gli errori prima della calibrazione (cinematiche nominali) e dopo la calibrazione (cinematiche calibrate). Due tabelle sono fornite, una che mostra le statistiche riguardo errori di posizione e l'altra riguardo errori di distanza.
●Errori di posizione: gli errori di posizione sono l'accuratezza che il robot può ottenere di un punto con rispetto di un piano di riferimento.
●Errori di distanza: l'errore di distanza è ottenuto misurando l'errore di distanza di un paio di punti. La distanza tra i due punti vista dal robot (ottenuta tramite le cinematiche calibrate) è comparata con la distanza vista dal sistema di misurazione (misurato fisicamente). Tutte le combinazioni sono prese in considerazione. Se prendiamo 315 misurazioni avremmo 315x315/2 = 49455 valori di errore distanza.
Le statistiche fornite sono l'errore medio, la deviazione standard (std) e l'errore massimo. È anche possibile fornire la media più tre volte la deviazione standard, che corrisponde all'errore atteso nel 99.98% delle misurazioni (se prendiamo in considerazione che l'errore segue una distribuzione normale)
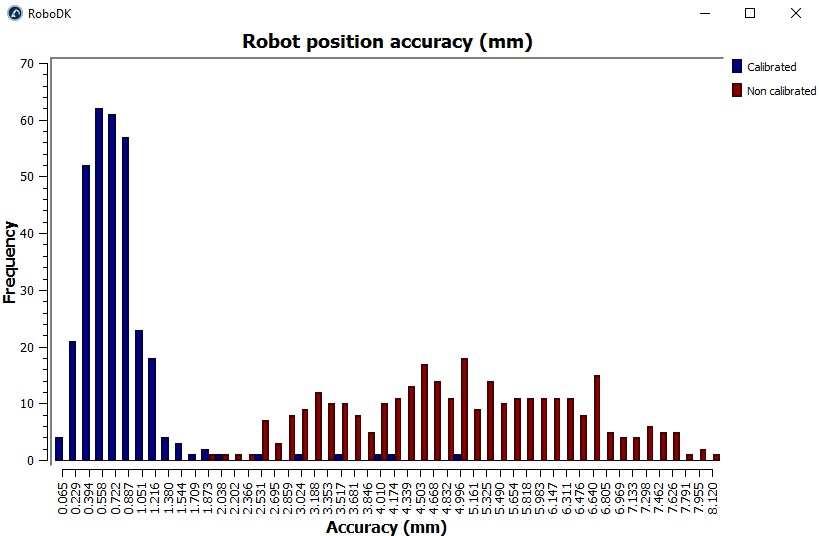
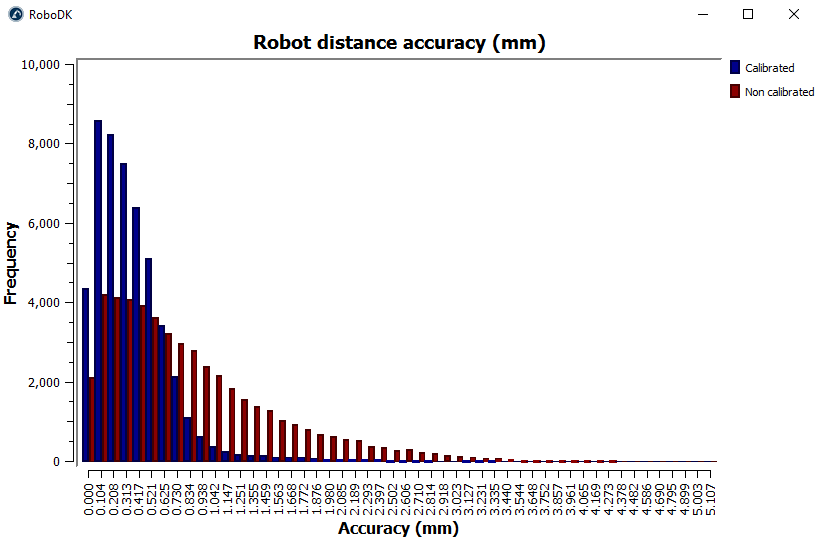
Seleziona Mostra stats e due istogrammi compariranno mostrando la distribuzione degli errori prima e dopo la calibrazione, un istogramma per l'accuratezza di posizione e l'altro per la distanza. La seguente immagine corrisponde alle 315 misurazioni di validazione usate in questo esempio.
Infine, possiamo selezionare Crea Report e un report in PDF con le informazioni presentate in questa sezione sarà generato.