Calibrazione piano di riferimento
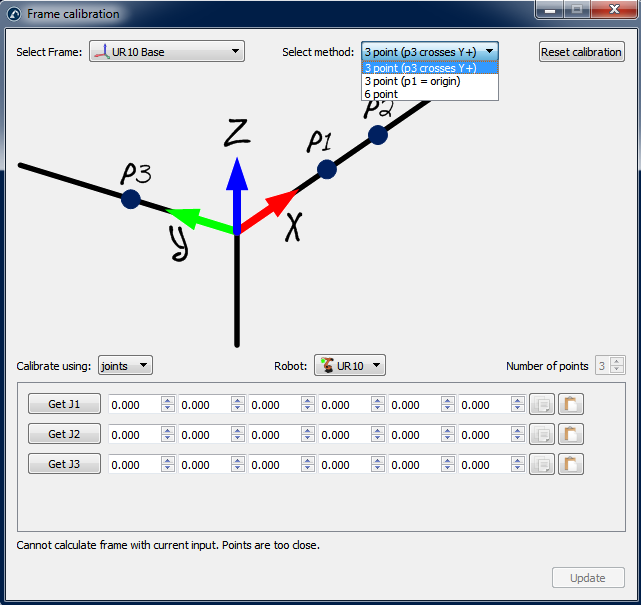
Seleziona Utilità➔Calibra piano di riferimento per calibrare un piano di riferimento. È possibile impostare un piano di riferimento utilizzando metodi differenti. Nell'esempio in figura, un piano di riferimento è definito da tre punti: punto 1 e 2 definiscono la direzione dell'asse X e il punto 3 definisce Y positivo.
Importante: È raccomandato usare bersagli giunti e attivare l'accuratezza del robot prima di calibrare il piano di riferimento siccome l'accuratezza del braccio robotico aiuta a definire meglio il piano di riferimento.
Nota: Più informazioni disponibili riguardo alla calibrazione dei piani di riferimento nella sezione suggerimenti.