Misurare i bersagli di riferimento
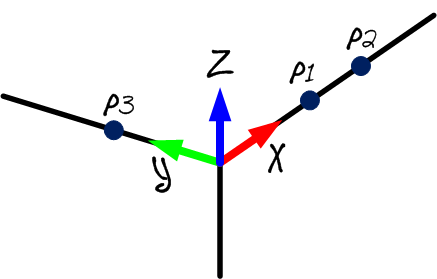
È raccomandato misurare un piano di riferimento della calibrazione, collegato alla base del robot, questo sarà utile se vogliamo muovere il tracker durante la calibrazione o comparare due calibrazioni robot. Il riferimento calibrazione deve essere definito da 3 punti tangibili.
Possiamo saltare questo passaggio se non andremo a muovere il tracker con rispetto del robot o non necessitiamo di ottenere la posizione home per l'asse 1. In questo cao, il piano di riferimento del laser tracker verrà usato.
Dovviamo seguire questi passaggli ogni volta che il laser tracker viene spostato:
1.Seleziona Connetti➔Connetti laser tracker
2.Imposta l'IP del laser tracker e seleziona connetti (se il laser tracker non è connesso)
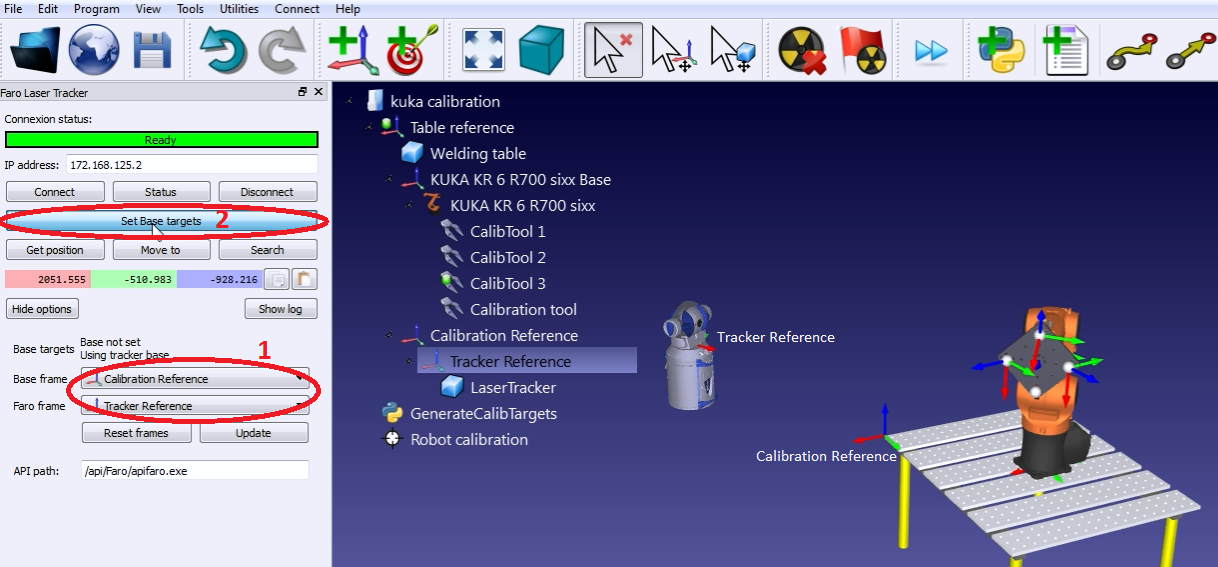
3.Imposta il riferimento calibrazione e il riferimento tracker come mostrato nell'immafine. Il riferimento calibrazione è anche conosciuto come Riferimento misurazioni.
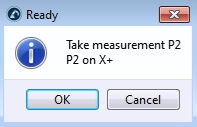
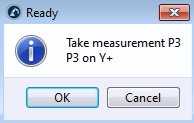
4.Seleziona Imposta bersagli base
RoboDK guiderà l'utente con i menu mostrati nella prossima immagine. La posizione del tracker laser sarà aggiornata automaticamente con rispetto del riferimento calibrazione quando la procedura è completa.