Piano di riferimento e riferimento tool
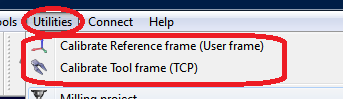
RoboDK fornisce alcune utilità per calibrare i piani di riferimento e il piano tool. Questi strumenti possono essere trovati in Utilità➔Calibra Piano di Riferimento e Utilità➔Calibra Piano Tool rispettivamente.
Per calibrare un piano di riferimento o un piano tool (conosciuto anche come Piano Utente o TCP) abbiamo bisogno di alcune configurazioni robot che tocchino 3 o più punti, queste configurazioni possono esser o valori giunti o coordinate cartesiane (con orientamenti, in alcuni casi). È raccomandato usare i valori giunti invece che le coordinate cartesiano siccome è più semplice controllare la vera configurazione robot in RoboDK (facendo copia incolla dei punti nella schermata principale di RoboDK)
Calibrazione tool
Seleziona Utilità➔Calibra tool per calibrare il TCP utilizzando RoboDK. Possiamo usare quanti punti vogliamo, usando differenti orientamenti. Più punti e orientamenti diversi cambiano meglio sarà stimato il TCP come anche il suo errore.
Le seguenti due opzioni sono disponibili per calibrare un TCP:
●Toccando un punto stazionario con il TCP seguendo differenti orientamenti.
●Toccando un piano con il TCP (come uno strumento di misurazione)
È raccomandato calibrare toccando un piano se dobbiamo calibrare uno strumento di misurazione o un mandrino. Questo metodo è più stabile per errori utente.
Se il TCP è una sfera, il centro della sfera è calcolato automaticamente come nuovo TCP (non è necessario fornire il diametro)
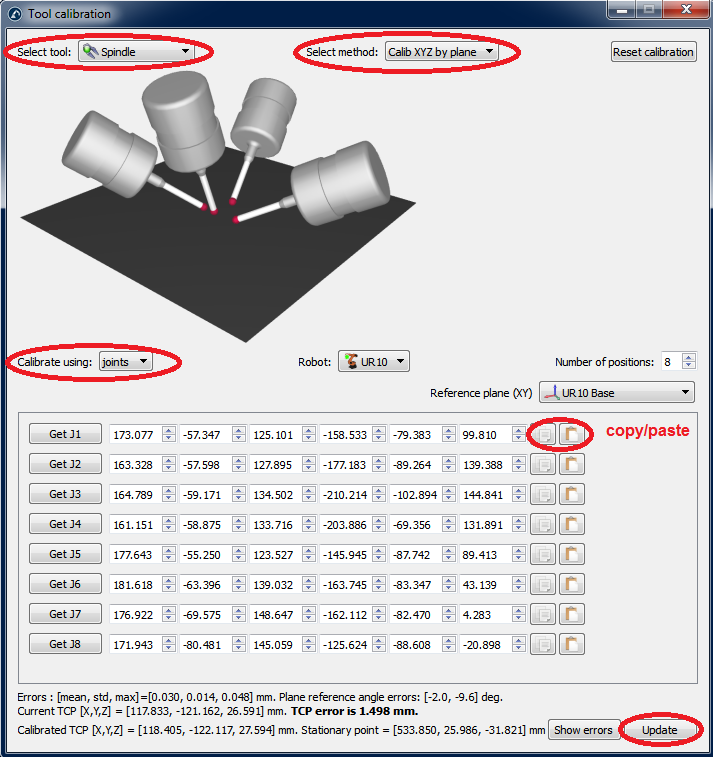
I seguenti passaggi devono essere seguiti per calibrare il TCP con un piano (come visualizzato nell'immagine):
1.Seleziona un tool che ha bisogno di esser calibrato.
2.Seleziona il metodo di calibrazione➔Calibrazione da piano XYZ.
3.Seleziona calibra usando giunti.
4.Seleziona il robot utilizzato.
5.Seleziona il numero di configurazioni che sarà utilizzato per la calibrazione (è raccomandato usare almeno 8 configurazioni)
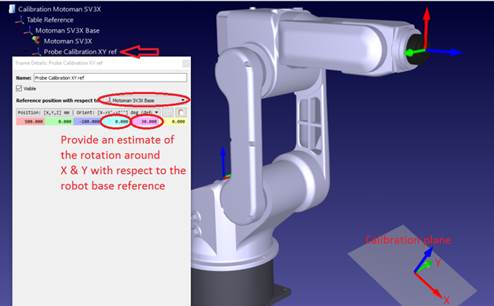
6.Seleziona una stima del piano di riferimento. Se il piano di riferimento non è parallelo al piano XY del robot (dal riferimento del robot) dobbiamo aggiundere una stima di questo piano di riferimento con almeno +/- 20 gradi. La posizione di questo piano non è importante, solo l'orientamento.
7.Possiamo iniziare a inserire i valori giunti. Possiamo inserirli manualmente o facendo copia incolla con i pulsanti (come mostrato nell'immagine). Possiamo anche usare il pulsante Ottieni Jx per ottenere i valori giunti correnti dal robot nel simulatore. Se stiamo ottenendo giunti dal robot reale connesso al robot dobbiamo prima selezionare Ottieni giunti correnti dal pannello connessione robot (immagine sucessiva o Appendix). È raccomandato tenere una copia separata dei giunti usati per la calibrazione.
1.Una volta che la tabella è completa vedremo dei nuovi valori del TCP (X,Y,Z) come anche TCP calibrato, alla fine della finestra. Possiam selezionare Aggiorna e il nuovo TCP verrà aggiornato nella stazione RoboDK. L'orientamento non sarà trovato usando questo metodo.
2.Possiamo mostrare Visualizza errori e vedremo l'errore di ogni configurazione con rispetto del TCP calcolato (che è la media di tutte le configurazioni). Possiamo cancellare una configurazione se ha un errore maggiore delle altre.
3.Dobbiamo aggiornare manualmente i valori nel controller del robot reale (X,Y,Z soltanto). Se questo TCP viene usato per generare programmi da RoboDK non è necessario aggiornare il controller.
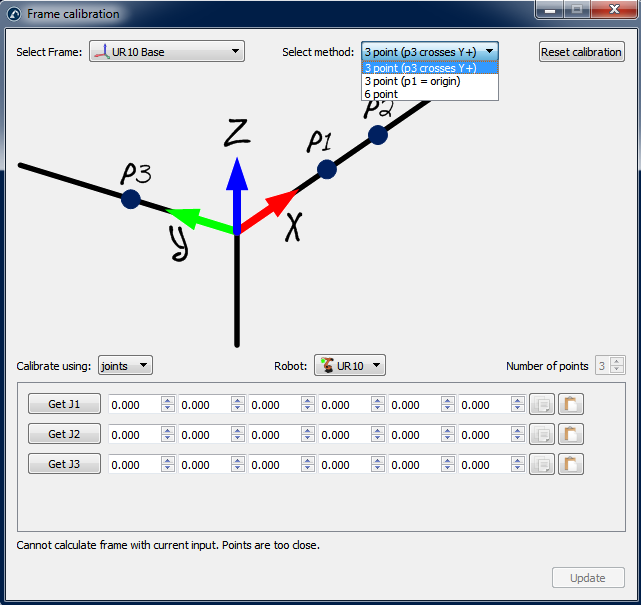
Calibrazione piano di riferimento
Seleziona Utilità➔Calibra piano di riferimento per calibrare un piano di riferimento. È possibile impostare un piano di riferimento utilizzando metodi differenti. Nell'esempio in figura, un piano di riferimento è definito da tre punti: punto 1 e 2 definiscono la direzione dell'asse X e il punto 3 definisce Y positivo.