Setup calibrazione robot
È richiesto connettersi al laser tracker e al robot dal computer per automatizzare la procedura di ottenimento delle misurazioni. È anche raccomandato misurare un piano di riferimento tramite tre punti nel caso muovessimo il tracker laser (questo step è obbligatorio se vogliamo recuperare la posizione home dell'asse 1, vedi Annex II per più informazioni)
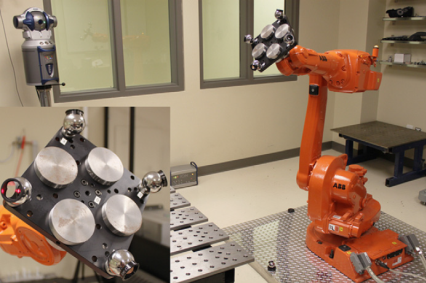
È richiesto collegare almeno un bersaglio SMR (tree o più sono raccomandati), come mostrato nella seguente immagine. È anche conveniente usare 3 nidi come piani di riferimento se il tracker laser deve esser mosso.
La seguenti sottosezioni deve essere effettuate in sequenza per esser pronti a prendere misurazioni.
Connetti al tracker
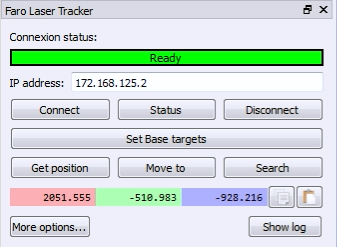
L'IP del tracker laser è richiesto per impostare propriamente la comunicazione con RoboDK. Segui questi passaggi per verificare la comunicazione con il laser tracker:
a.Seleziona il menu « Connect➔Connect laser tracker ». Una nuova finestra dovrebbe aprirsi.
b.Imposta l'IP del laser tracker.
c.Clicca sul pulsante Connect
Se la connessione è avvenuta, dovresti vedere un messaggio verde che mostra "Ready". La finestra può essere chiusa e la connessione rimarrà attiva.
Connetti il robot
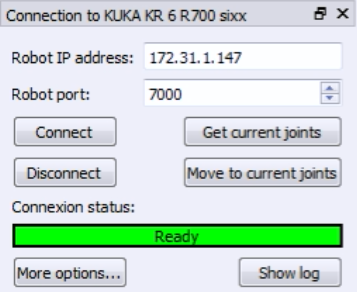
L'IP del robot (o la porta COM per connessioni RS232) è necessario per impostare la comunicazione con RoboDK. Segui questi passaggi per verificare la connessione al robot:
1.Seleziona Connetti➔Connetti robot. Una nuova finestra apparirà.
2.Imposta l'IP e la porta del robot (o la porta COM)
3.Clicca il pulsante Connetti
4.Riferisci all'Appendix I se incorri in qualche problema
Se la connessione è stata un successo dovresti vedere un messaggio verde che mostra Ready. La posizione del robot virtuale dovremme corrispondere alla posizione del robot reale se selezioniamo Ottieni giunti correnti. In alternativa, selezioniamo Muovi su giunti correnti per muovere il robot nella posizione corrente nel simulatore. La finestra può esser chiusa e la connessione rimane attiva.
Misurare i bersagli di riferimento
È raccomandato misurare un piano di riferimento della calibrazione, collegato alla base del robot, questo sarà utile se vogliamo muovere il tracker durante la calibrazione o comparare due calibrazioni robot. Il riferimento calibrazione deve essere definito da 3 punti tangibili.
Possiamo saltare questo passaggio se non andremo a muovere il tracker con rispetto del robot o non necessitiamo di ottenere la posizione home per l'asse 1. In questo cao, il piano di riferimento del laser tracker verrà usato.
Dovviamo seguire questi passaggli ogni volta che il laser tracker viene spostato:
1.Seleziona Connetti➔Connetti laser tracker
2.Imposta l'IP del laser tracker e seleziona connetti (se il laser tracker non è connesso)
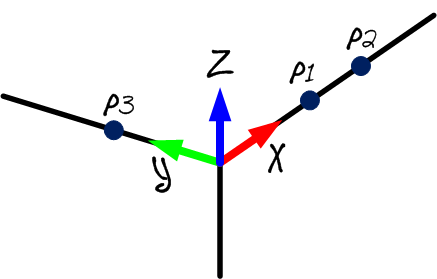
3.Imposta il riferimento calibrazione e il riferimento tracker come mostrato nell'immafine. Il riferimento calibrazione è anche conosciuto come Riferimento misurazioni.
4.Seleziona Imposta bersagli base
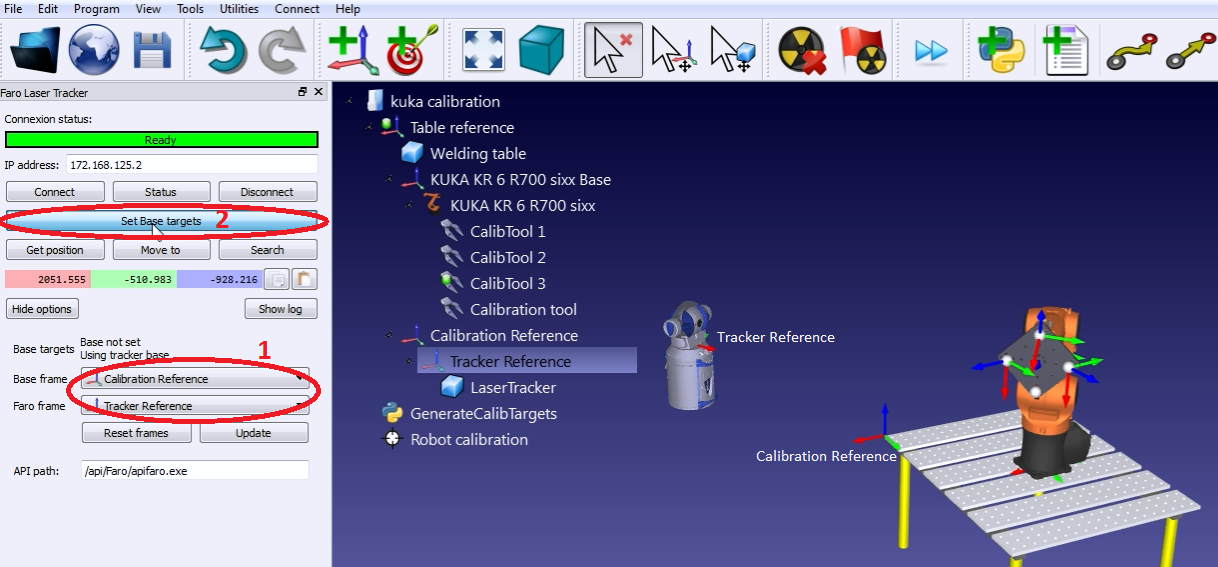
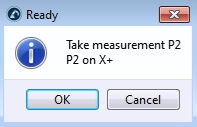
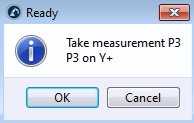
RoboDK guiderà l'utente con i menu mostrati nella prossima immagine. La posizione del tracker laser sarà aggiornata automaticamente con rispetto del riferimento calibrazione quando la procedura è completa.