Come utilizzare un Driver
Segui questi passaggi per utilizzare un Driver Robot con RoboDK:
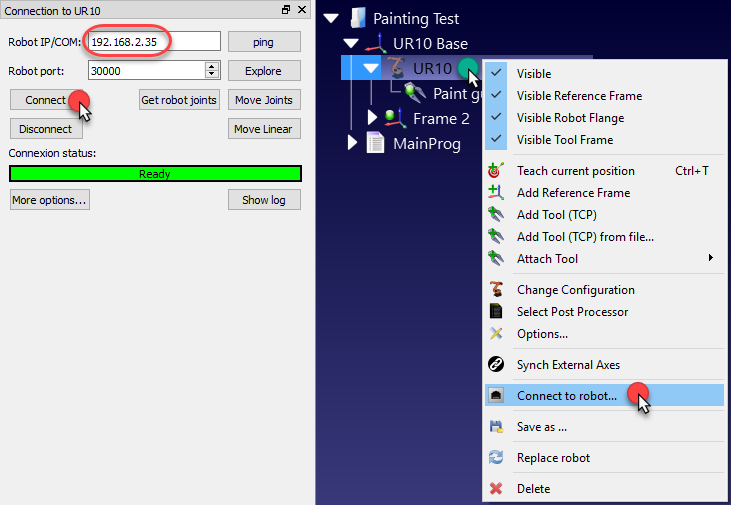
1.Tasto destro sul robot
2.Seleziona 
3.Immetti l'IP del robot
4.Select Connect
Un messaggio verde apparirà visualizzando Ready se la connessione è avvenuta, come mostra la prossima immagine.
Utilizzando la GUI
Un programma robot può esser creato utilizzando l'interfaccia grafica (GUI) e può esser eseguito sul robot seguendo questi passaggi:
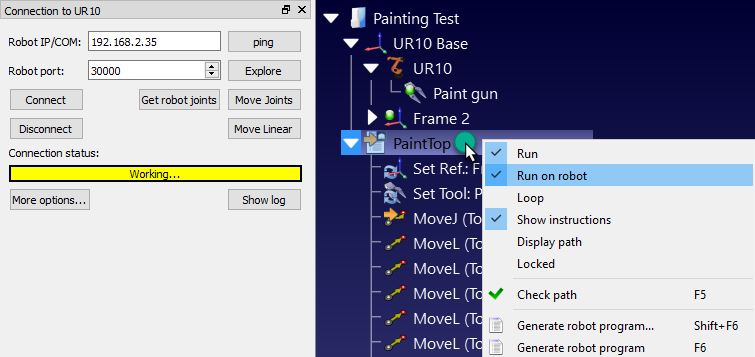
1.Tasto destro su un 
2.Seleziona l'opzione Avvia su robot
3.Doppio click sul programma per farlo partire
Il programma dovrebbe iniziare sul robot reale e il simulatore dovrebbe seguire i movimenti del robot. Lo stato della connessione visualizzerà Working... in giallo quando il robot è occupato.
Utilizzando l'API
È possibile controllare i movimenti di un robot dall'API, per esempio, programmare un robot in Python o C#.
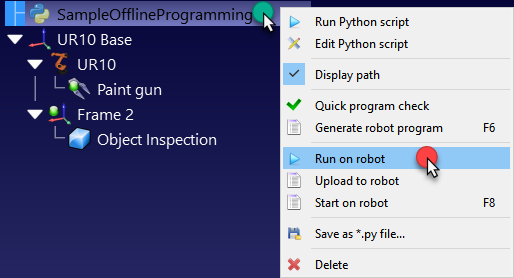
L'opzione inizia su robot è gestita in automatico quando un programma python è avviato da RoboDK. Segui questi passaggi per iniziare un programma Python sul robot:
1.Tasto destro su 
2.Seleziona
Il programma dovrebbe iniziare sul robot e lo stato di connessione aggiornarsi in accordo.
Se il programma è eseguiro fuori dalla GUI di RoboDK (per debugging o se stiamo usando l'API C#) possiamo impostare RunMode utilizzando RDK.setRunMode su RUNMODE_RUN_ROBOT.
Ciò forzerà il programma ad essere eseguiro sul robot. È anche possibile stabilire una connessione utilizzando robot.Connect().
Il seguente codice mostra un breve esempio su come stabilire una connessione con il robot direttamente dall'API:
# Start the RoboDK API
RDK = Robolink()
robot = RDK.Item('',ITEM_TYPE_ROBOT)
# Connect to the robot using default connetion parameters
success = robot.Connect()
status, status_msg = robot.ConnectedState()
if status != ROBOTCOM_READY:
# Stop if the connection did not succeed
raise Exception("Failed to connect: " + status_msg)
# Set to run the robot commands on the robot
RDK.setRunMode(RUNMODE_RUN_ROBOT)
# Note: This is set automatically if we use
# robot.Connect() through the API
# Move the robot:
robot.MoveJ([10,20,30,40,50,60])
prog = RDK.Item('MainProgram', ITEM_TYPE_PROGRAM)
prog.setRunType(PROGRAM_RUN_ON_ROBOT) # Set the run on robot option
# Set to PROGRAM_RUN_ON_SIMULATOR to run on the simulator only
prog.RunProgram()
while prog.Busy() == 1:
pause(0.1)
print("Program done")