Personalizzare Driver Robot
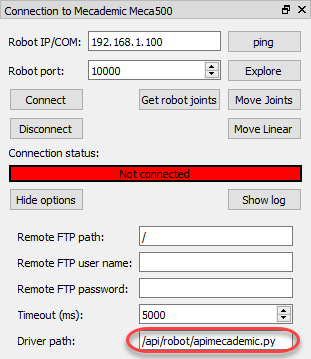
Driver robot sono essere localizzati nella cartella RoboDK/api/Robot/ di default. RoboDK si collega ad un driver specifico tramite le impostazioni connessione:
1.Tasto destro sul robot
2.Seleziona 
3.Seleziona Più opzioni...
4.Localizza o immetti il percorso del driver nella sezione Driver path
Un robot driver è un'applicazione stanalone. Driver robot posson esser sviluppati utilizzando qualsiasi piattaforma di programmazione, ad esempio, posson essere moduli Python (formato PY) o eseguibili compilati con qualsiasi IDE.
Il driver robot permette di comunicare con il robot tramite la linea di comando. Lo stesso comando che può essere eseguito manualmente può anche essere utilizzato da RoboDK per pilotare il robot dal PC. Ogni driver robot può essere avviato dalla console per testarlo.
Un semplice driver Python (apimecademic.py) con il suo codice sorgente per controllare robot Mecademic è disponibile in C:/RoboDK/bin/robot/.
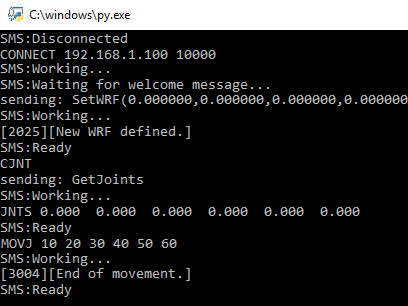
Fai doppio click su apimecademic.py per eseguire il modulo nella console (Python deve esser installato). Il driver aspetterà per nuovi comandi. Ad esempio, possiamo immettere il seguente comando per collegarci al robot fornendo IP e porta:
CONNECT 192.168.100.1 10000
Se la connessione è avvenuto dovremmo vedere un messaggio SMS:Ready. Poi, possiamo immettere il seguente comando per ottenere i giunti robot:
CJNT
Possiamo anche immettere altri comandi come MOVJ, MOVL o SETTOOL per muovere il robot o aggiornare il TCP:
MOVJ 10 20 30 40 50 60
Alcuni robot supportano il monitoraggio dei giunti in real time. In questo caso è possibile fornire posizioni giunti come feedback quando il robot si muover inviando il comando JNTS_MOVING. Quando il driver è avviato da RoboDK il robot virtuale seguirà i movimenti del robot reale in real time. Un nuovo comando non sarà processato fino a che il comando Ready viene inviato.
L'interazione con la console e la connessione al robot sono gestiti dal modulo Python per il driver Mecademic. L'interazione con la conseole dovrebbe essere la stessa per tutti i robot, come descritto in questa sezione. Tuttavia, l'interazione con il robot dipende dal produttore robot, in questo caso ci riferiamo al manuale Meca500 per inviare i comandi appropriati per muovere e monitorare il robot Meca 500.