Configurazione Preferita
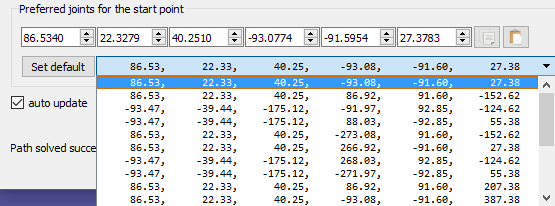
RoboDK seleziona automaticamente la configurazione iniziale che è più vicina alla configurazione di partenza (Giunti preferiti per punto iniziale). Da quel punto, il robot seguirà movimenti lineari, quindi la configurazione robot non cambierà.
Un menu a scomparsa visualizzerà tutte le possibili soluzioni per iniziare il programma. Se richiesto, seleziona una configurazione preferita e seleziona Aggiorna per ricalcolare il programma.