Ottimizzazione Parametri
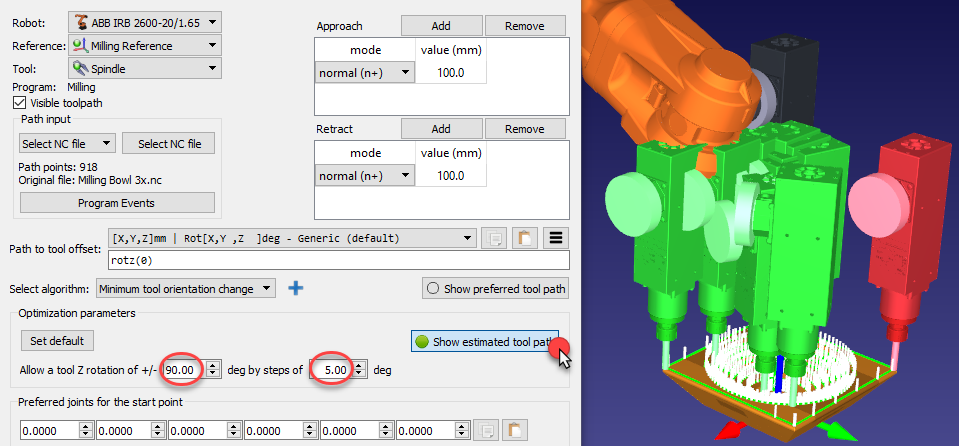
Dato un orientamento preferito, il robot può avere una certa libertà di ruotare attorno all'asse Z del tool. Ciò permette al robot di compiere il programma evitando singolarità e costrizioni assi. Di default, RoboDK permette al tool di ruotare di +/- 180 gradi attorno all'asse TCP in step di 20 gradi.
È raccomandato costringere questa rotazione dipendentemente dall'applicazione. Per esmpio, è possibile immettere +/- 90 gradi per costringere la rotazione di metà.
Suggerimento: Seleziona Mostra percorso stimato per vedere i punti raggiungibili e irrangiungibili (in rosso). I punti raggiungibili possono esser ruotati con rispetto del percorso preferito per rendere i bersagli raggiungibili dal robot.
Se alcuni punti del percorso non sono raggiungibili, è raccomandato spostare il piano di riferimento o essere più permissivi con la rotazione su Z. Il piano di riferimento può essere mosso tenendo premuto Alt.
Nota: Il percorso stimato verrà visualizzato se il piano di riferimento o il TCP vengono modificati se l'opzione Auto update è selezionata.
Suggerimento: Valori più piccoli permettono un più graduale riorientamento del tool quando passa singolarità. Dall'altra parte, potrebbe volerci più tempo a calcolare il percorso.
Nota: Impostare la rotazione permessa attorno all'asse Z di 0 gradi per costringere il tool in accordo all'orientamento preferito.