Percorso in offset tool
Il percorso in tool offset permette di modificare l'orientamento preferito del tool lungo il percorso. Questa opzione è principalmente utilizzata per ruotare il robot attorno all'asse Z del TCP.
Visto che un robot a 6 assi è utilizzato per seguire un programma per 3 o 5 assi dobbiamo aggiungere un grado di libertà aggiuntivo. Questo grado di libertà è solitamente la rotazione attorno all'asse Z del TCP.
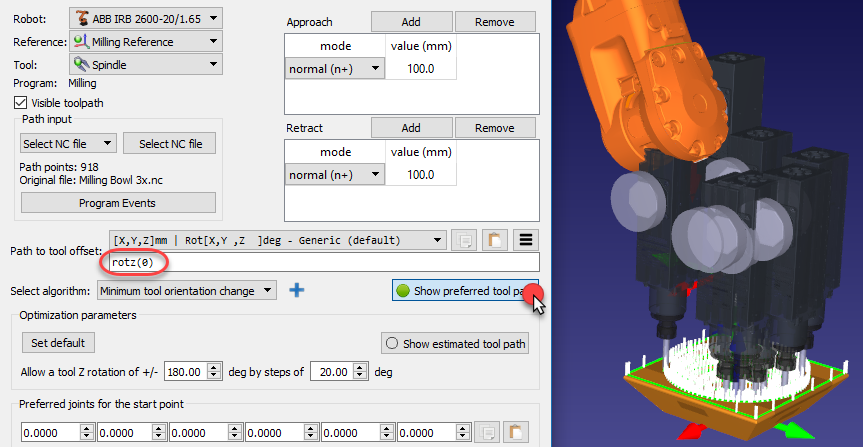
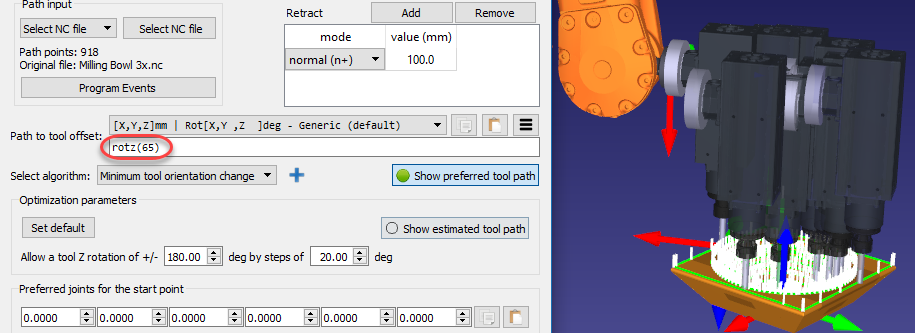
Di default, il percorso in tool offset visualizza la trasformazione rotz(0). Questo valore può essere modificato per stabilire l'orientamento preferito del tool, modificare l'orientamento attorno all'asse Z del TCP o in combinazione con altri assi. L'orientamento preferito è l'orientamento che il robot proverà a mantenere mentre segue il percorso.
Di default, RoboDK utilizza l'algoritmo di Minima modifica dell'orientamento. Ciò significa che l'orientamento del tool è mantenuto più costante possibile lungo il percorso. In generale, questa opzione è utilizzabile in operazioni di fresatura perchè minimizza i movimenti giunti del robot. In alternativa, altri algoritmi/motodi sono disponibili, come tool segue percorso (per applicazioni di taglio) o robot tiene l'oggetto se il percorso deve essere seguito collegato al tool del robot (per esempio, dispensare o applicazioni di lucidatura).