Progetto Segui Curva
È possibile far si che il robot segua curve nello spazio 3D con RoboDK. Curve in RoboDK possono essere selezionate da spigoli di oggetti o importati da una lista di punti in file CSV. Questa opzione è utile per applicazioni di saldatura.
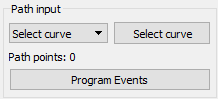
Seleziona Utilità➔Progetto Segui Curva per aprire le impostazioni segui curva. Queste impostazioni sono le stesse del Progetto Fresatura, l'unica differenza è che l'Input percorso è preselezionato su Seleziona curva
Seleziona Seleziona curva per selezionare le curve sullo schermo.
Seleziona le curve con il click del tasto sinistro del mouse. Selezionare le curve due volte invertirà la direzione del movimento. Inoltre cliccare con il tasto destro su una curva precedentemente selezionata permette di cambiarne il senso o deselezionarla.
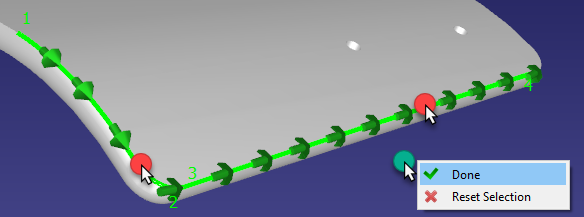
Cliccare con il tasto destro sullo schermo e selezionare Fatto o premere il tasto Esc per tornare indietro nel menu impostazioni. Il percorso verde mostrerà i movimenti del robot con rispetto dell'oggetto.
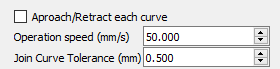
Alcune opzioni addizionali sono disponibili in alto a destra delle impostazioni, ad esempio la velocità e i movimenti di approcio/ritrazione devono essere applicati ad ogni curva. Le impostazioni di default sono visualizzate nella prossima immagine:
Importa Curve
Curve possono essere importati in RoboDK da un file CSV o un file testo selezionando Utilità➔Importa Curve. Un nuovo oggetto apparirà nella stazione mostrando le curve come oggetto.
Il file può essere un file di testo con coordinate 3D di ogni punto della curva. Opzionalmente, l'orientamento dell'asse Z del tool può essere fornito come vettore i,j,k.
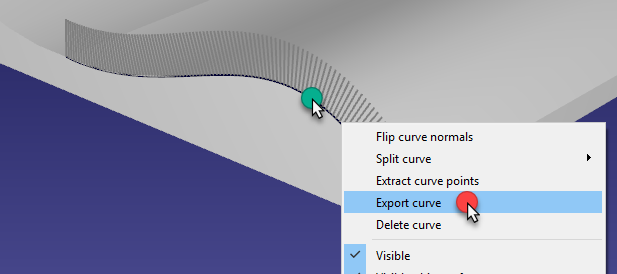
Opzionalmente, curve esistenti di un oggetto possono essere esportate come un file CSV (tasto destro su una curva, poi, seleziona Esporta curva), modificala e reimportala in RoboDK.