Progetto Stampa 3D
Stampa 3D o additive manufacturing è il processo di creazione tridimensionale di oggetti solidi da un file digitale. Robot industriali possono essere usati come stampanti a 3 assi o 5 assi con RoboDK. Il seguente video mostra una panoramica di come impostare la stampa 3D con RoboDK: guarda.
Stampa 3D con robot è possibile in una delle seguenti condizioni:
●Convertendo direttamente un programma G-code (file NC) in programmi robot con RoboDK, come mostrato con il progetto fresatura. Il rapporto di materiale (parametro E) è preso in considerazione per ogni movimento e può essere integrato nel programma generato come un Evento Programma. Il G-code è un tipo di file NC supportato da RoboDK ed è anche un formato supportato da molte stampanti 3D. La maggiorparte dei software di slicing possono generare il G-code dato un file STL.
●Seleziona Utilità➔Progetto di stampa 3D per aprire le impostazioni di stampa 3D. Queste impostazioni sono le stesse del progetto fresatura, l'unica differenza è che l'input percorso è preselezionato in oggetto stampa 3D. Seleziona Seleziona oggetto per selezionare l'oggetto sullo schermo e automaticamente ottenere il percorso. Seleziona opzioni stampa 3D per aprire Slic3r.
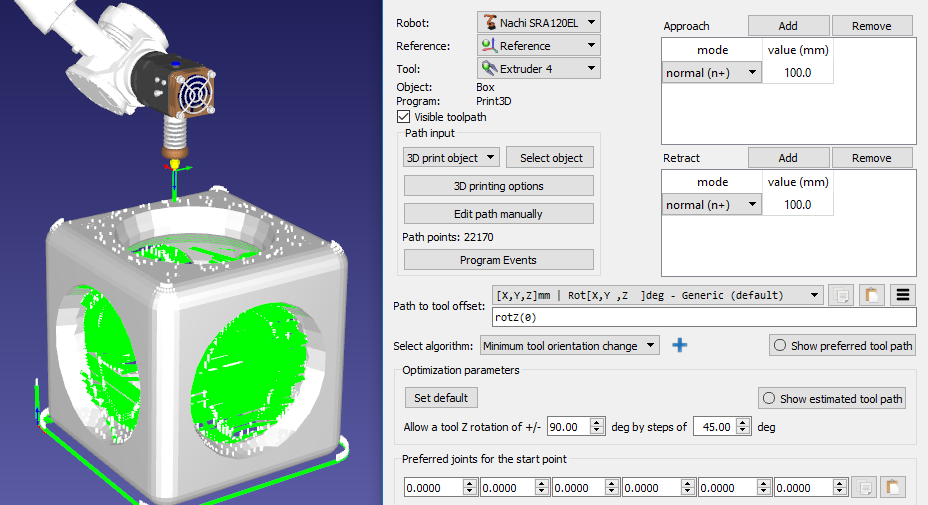
Di default, RoboDK traduce i valori E come chiamate programma ad un programma chiamato Extruder passando anche il valore E come parametro. Seleziona Eventi Programma per modificare questo comportamento.
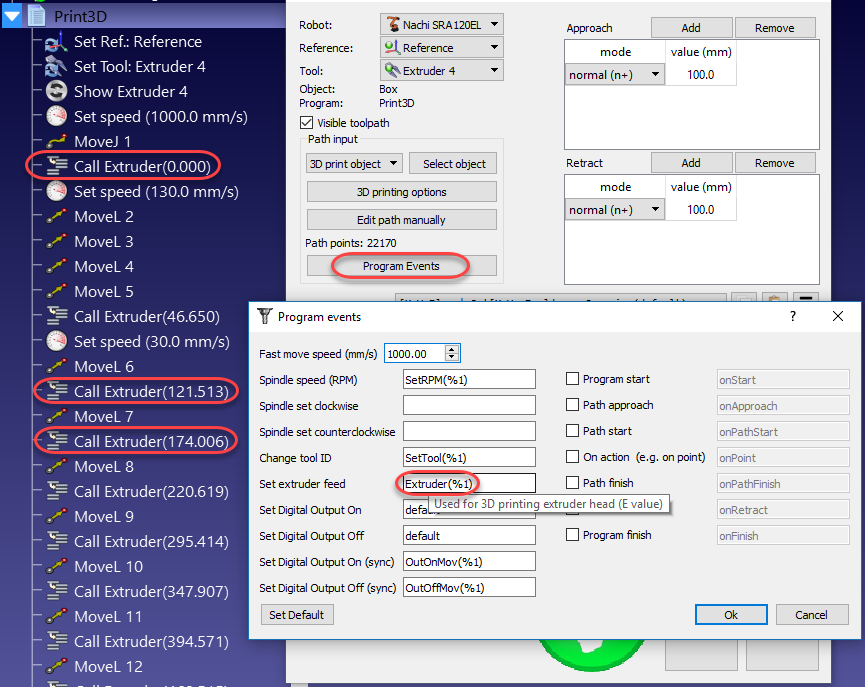
Il valore di estrusione (E) rappresenta quanto materiale deve essere estruso prima di ogni movimento. Questo valore può essere utilizzato per gestire il feed dell'estrusore dal robot tenendo in considerazione la velocità e la distanza tra i punti.
In alternativa, è possibile calcolare il feed utilizzando un post processore e generare codice appropriato. La prossima sezione fornisce un esempio.
Post Processori per stampanti 3D
Questa sezione mostra come modificare un post processore robot per calcolare il feed dell'estrusore prima di eseguire ogni movimento. In alternativa, questi calcoli possono essere fatti dal controllore robot.
Il primo step è quelli di intercettare le chiamate all'estrusore e leggerne i valori dalla sezione RunCode del post processore:
def RunCode(self, code, is_function_call = False):
if is_function_call:
if code.startswith("Extruder("):
# Intercept the extruder command.
# if the program call is Extruder(123.56)
# we extract the number as a string
# and convert it to a number
self.NEW_E_LENGTH = float(code[9:-1])
# Skip the program call generation
return
else:
self.addline(code + "()")
else:
# Output program code
self.addline(code)
Il valore di estrusione è salvato nella variabile NEW_E_LENGTH. Poi, dobbiamo definire una nuova procedura che genera un appropriato comando in accordo alla distanza tra i movimenti, la velocità robot e l'accelerazione robot. Ciò assume che il feed dell'estrusore è gestito da un output analogico dal controllore robot (output analogico numero 5 in questo esempio)
def new_move(self, pose1, pose2):
if pose1 isNone:
return
def Calculate_Time(Dist, Vmax, Amax):
'''Calculate the time to move Dist with Amax acceleration and Vmax speed'''
tacc = Vmax/Amax;
Xacc = 0.5*Amax*tacc*tacc;
if Dist <= 2*Xacc:
# Vmax is not reached
tacc = sqrt(Dist/Amax)
Ttot = tacc*2
else:
# Vmax is reached
Xvmax = Dist - 2*Xacc
Tvmax = Xvmax/Vmax
Ttot = 2*tacc + Tvmax
return Ttot
add_material = self.NEW_E_LENGTH - self.LAST_E_LENGTH
self.LAST_E_LENGTH = self.NEW_E_LENGTH
if add_material > 0:
distance_mm = norm(subs3(pose1.Pos(), pose2.Pos()))
# calculate movement time in seconds
time_s = Calculate_Time(distance_mm, self.SPEED_MMS, self.ACCEL_MMSS)
# add material
self.setDO(5, (add_material/time_s))
else:
# DO not add material
self.setDO(5,0)
Infine, dobbiamo avviare il comando new_move con ogni nuova istruzione di movimento. Possiamo aggiungere questa chiamata all'inzio di ogni comando MoveL:
def MoveL(self, pose, joints, conf_RLF=None):
"""Add a linear movement"""
self.new_move(self.LAST_POSE, pose) # used for 3D printing