Imposta/Attendi IO
Seleziona Programma➔
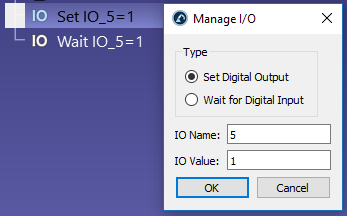
Il nome IO può essere un numero o un valore di testo se è una variabile nominativa. Il valore IO può essere un numero (0 per False 1 per True) o un valore testo se è uno stato nominativo.
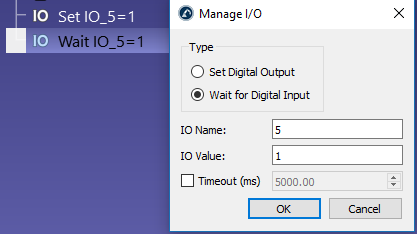
Imposta su Aspetta per Digital Input per fermare l'esecuzione del programma fino a che uno specifico input cambia in un valore specifico. In più, molti controller robot supportano un timeout per avere un errore se il tempo di attesa ha superato il valore specifico. Controlla l'opzione Timeout (ms) per attivare questa caratteristica.
Alterare Digital Input e Output simulati creerà nuove variabili della stazione. Per controllare lo stato di queste variabili puoi cliccare con il tasto destro sulla stazione e selezionare Parametri Stazione. È anche possibile leggere o modificare queste variabili tramite l'API.