Muovi Circolare
Seleziona Programma➔
A meno che due bersagli siano selezionati prima di aggiungere l'istruzione, l'istruzione di movimento non creerà due nuovi tracciati. È richiesto aggiungere due o più bersagli separatamente e collegarli all'istruzione di movimento circolare come mostrato nella prossima immagine.
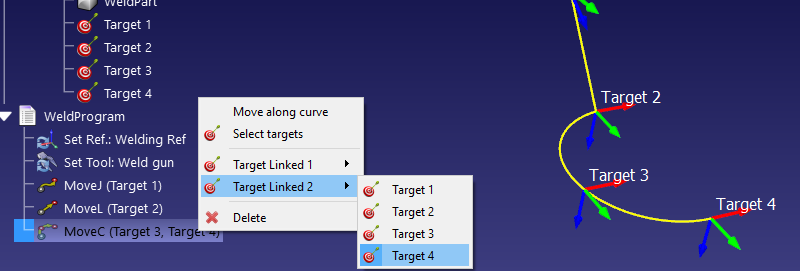
Il percorso circolare è un arco creato dai punti dove il robot è localizzato, passando per il primo punto circolare (Target Linked 1) e finendo al punto finale (Target Linked 2).
Importante: Non è possibile ottenere un movimento circolare completo con una singola istruzione circolare. Un cerchio completo deve essere diviso in due separati movimenti circolari.