Muovi Lineare
Seleziona Programma➔
A meno che un ber
A meno che un bersaglio sia selezionato prima di aggiungere l'istruzione, l'istruzione di movimento creerà un nuovo bersaglio e i due saranno collegati. Se il bersaglio è mosso, anche il movimento è modificato.
Muovi Giunti e Muovi Lineare si comportano alla stessa maniera e possono essere scambiati facilmente da un tipo all'altro.
Joint Moves and Linear Moves behave the same way and can be easily switched from one type to the other.
Se questa è la prima istruzione aggiunta, due altre istruzioni verranno aggiunte prima dell'istruzione di movimento: una selezione del Piano di Riferimento e una selezione del Piano Tool. Ciò assicurerà che quando un programma raggiunge l'istruzione di movimento, il robot giusto e il tool giusto vengano utilizzati.
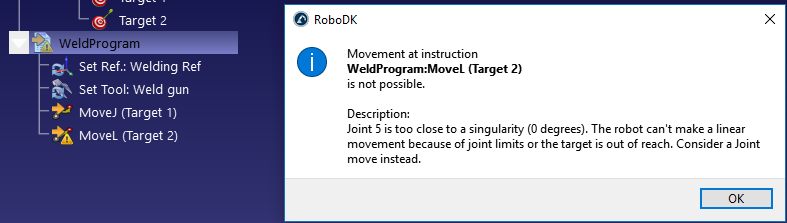
Contrariamente ai Movimenti Giunti, i Movimenti linare sono sensibili alle singolarità e ai limiti assi. Per esempio, un robot a 6 assi non può oltrepassare una singolarità seguendo un movimento lineare. La seguente immagine mostra un esempio che dice Joint 5 is too close to a singularity (0 degrees). […] Consider a Joint move instead.
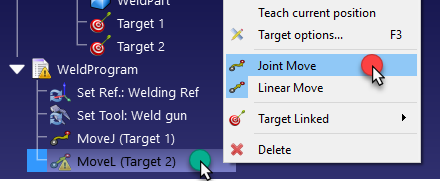
Se un movimento lineare non è strettamente necessario, clicca con il tasto destro sull'istruzione di movimento e modificala in un istruzione Giunti.
In alternativa, il bersaglio, il TCP o la posizione del piano di riferimento deve essere modificata per evitare singolarità.