Ballbar test
Questa sezione descrive i passaggi richiesti per prendere misurazioni con la ballbar.
Dovresti avere due programmi:
●BallbarSetup: questo programma permette di impostare il centro della ballbar nella stessa posizione che è stata registrata dai giunti robot.
●BallbarTest: questo programma è il percorso circolare attorno al centro della toolcup per acquisire le misurazioni con la ballbar.
Per assicurarsi che il centro del toolcup è nella posizione corretta dobbiamo avviare il programma BallbarSetup. Il robot si muoverà nel centro con un approcio lineare, Dobbiamo poi posizionare e chiudere i supporti magnetici.
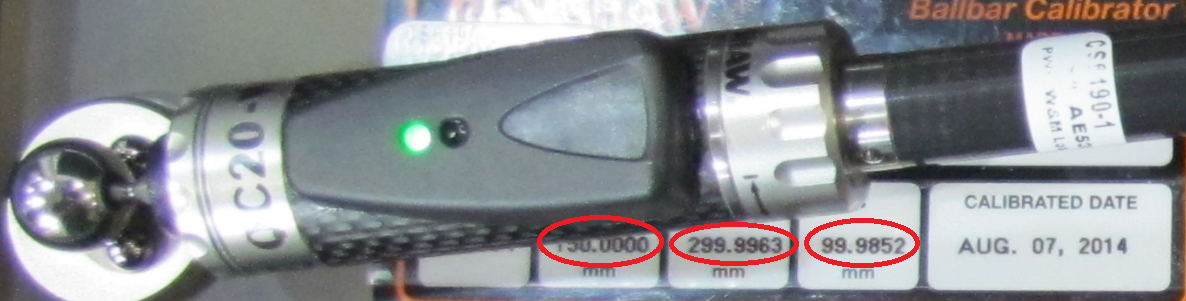
Dobbiamo assicurarci che abbiamo immesso propriamente i parametri di mastering del ballbar kit (guarda la prossima immagine). Questi valori devon esser inseriti nelle caselle Ballbar reference distance ... dal menu parametri test. La ballbar sarà in grado di misurare queste distanze +/- 1 mm con un'accuratezza di 1 micrometro. L'accuratezza è abbastanza per robot industriali, ma il range di misurazione può esser limitato in certi casi.
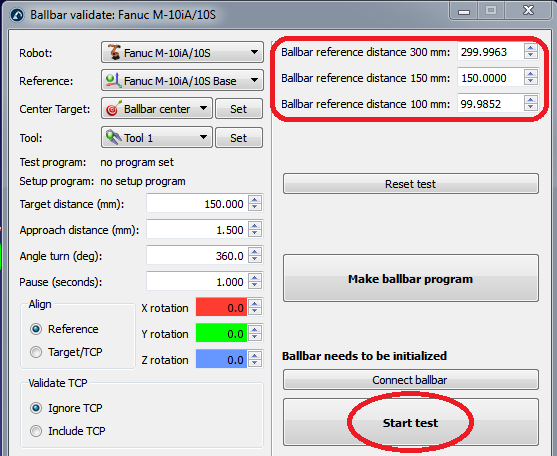
Possiamo iniziare il test selezionando Inizia test (non è richiesto selezionare prima Connetti ballbar). Una nuova finestra apparirà mostrando lo stato della connessione alla ballbar. Se la ballbar non è stata trovata o ci sono dei problemi, devi chiudere la finestra della connessione, spegnere la ballbar, riaccenderla e riprovare. Se il problema persiste, assicurati di avere una connessione Bluetooth appropriata.
Una volta stabilita la connessione Bluetooth con la ballbar, RoboDK ti guiderà nei seguenti passaggi:
1.Inizializzare la ballbar con la distanza selezionata.
2.Muovere il robot nella posizione di start (il programma andrà in pausa prima di continuare)
3.L'utente deve poi posizionare la ballbar sul robot.
4.Iniziare il test selezionando OK nello schermo del computer. Il robot non si muoverà fino a che selezioniamo continua sul robot teach pendant.
5.Se tutto è corretto una nuova finestra apparirà mostrando le misurazioni della ballbar.
6.Possiamo continuare con il programma robot muovendolo lungo il percorso.
7.Quando il robot termina i suoi movimenti, possiamo fermare le misurazioni (orario e antiorario)
Quando il test è finito, RoboDK mostrerà il risultato del test e chiederà all'utente di salvare il report in formato PDF.
Il passaggio 4 è importante per trovare l'inzio e la fine del test. Questi limiti sono trovati perchè il robot crea un movimento radiale di circa 1.5 mm per innescare l'inizio e la fine delle misurazioni (all'inizio e alla fine)