Creare una stazione RoboDK
I seguenti passaggi devon esser eseguiti per preparare il test offline:
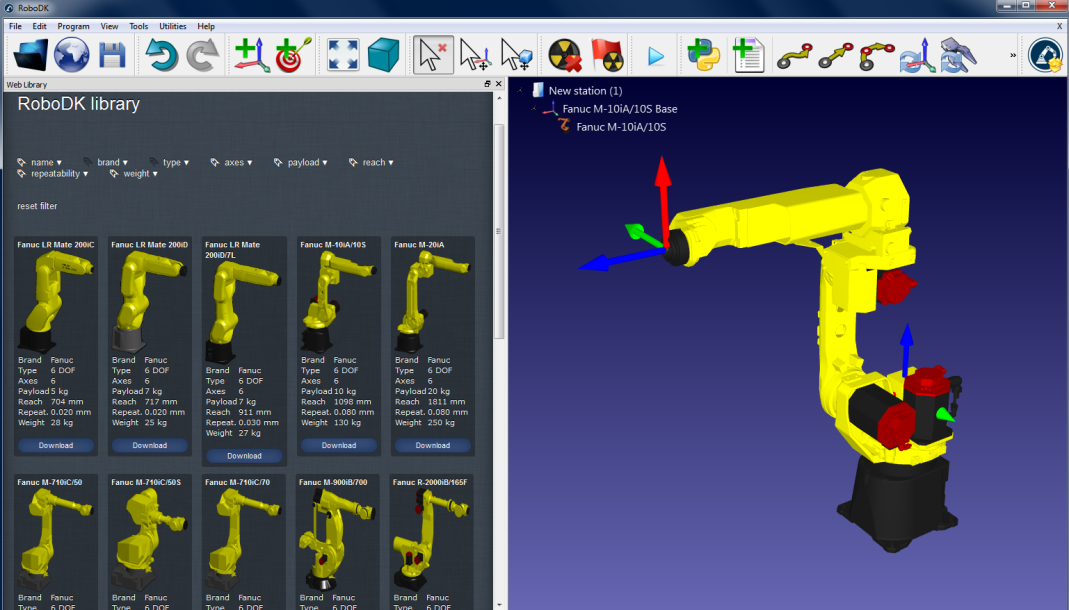
1.Seleziona il Robot:
a.Seleziona File➔Apri libreria online. Una nuova finestra apparirà con una lista dei robot.
b.(Opzionale) Usa i filtri per raffinare la selezione del robot.
c.Trova il tuo robot e seleziona Download.
In alternativa, seleziona File➔Apri... e seleziona un file robot nel computer. Questo file può essere scaricato dal sito web: https://robodk.com/libraryoppure ottenuto dopo un progetto di calibrazione.
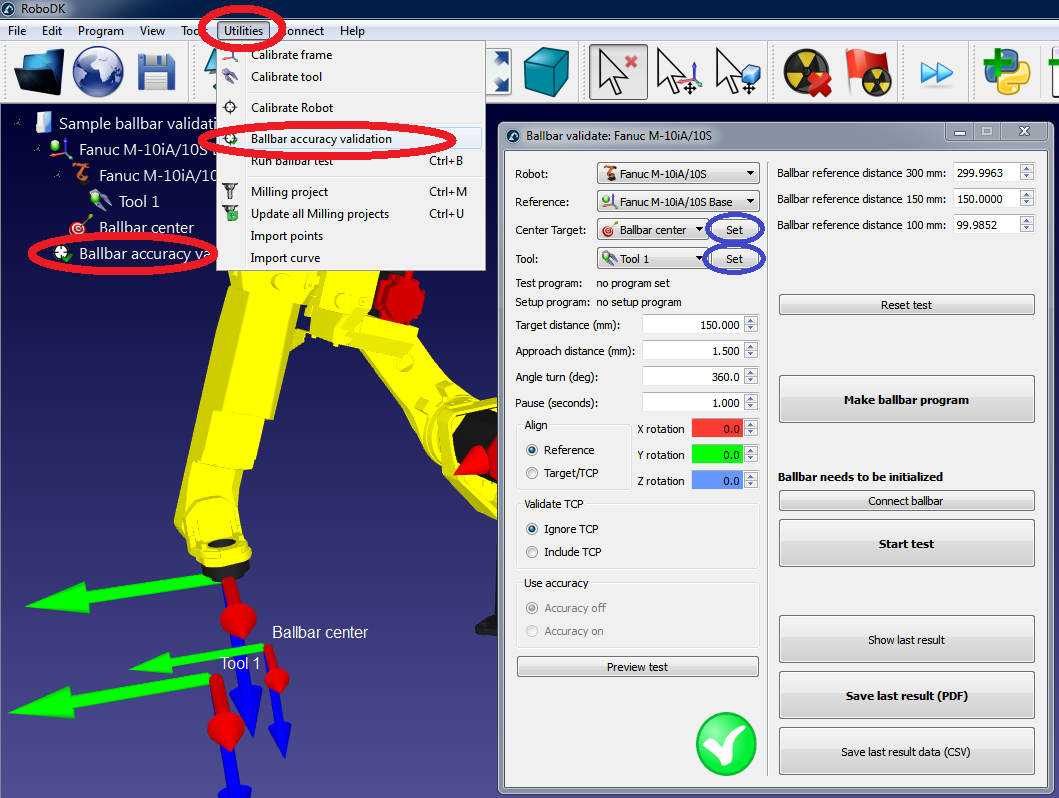
2.Aggiungi il modulo ballbar test nella stazione:
a.Seleziona Utilità➔Test accuratezza ballbar
b.La seguente finestra apparirà e un bersaglio Ballbar center sarà creato automaticamente. Se il robot non ha TCP, il TCP Tool 1 sarà anch'esso creato in automatico.
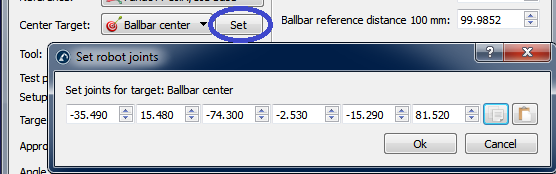
3.Inserisci i giunti robot del centro del ballbar test (bersaglio Ballbar center):
a.Seleziona Imposta dopo il bersaglio Ballbar center
b.Immetti i giunti robot (giunti asse da 1 a 6)
c.Seleziona OK
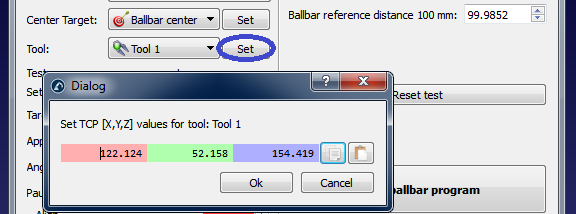
4.Immetti le coordinate TCP:
a.Seleziona Imposta dopo il tool selezionato (Tool 1 in questo esempio)
b.Immetti le coordinate X,Y,Z del TCP (relativi all'end effector del robot)
c.Seleziona OK
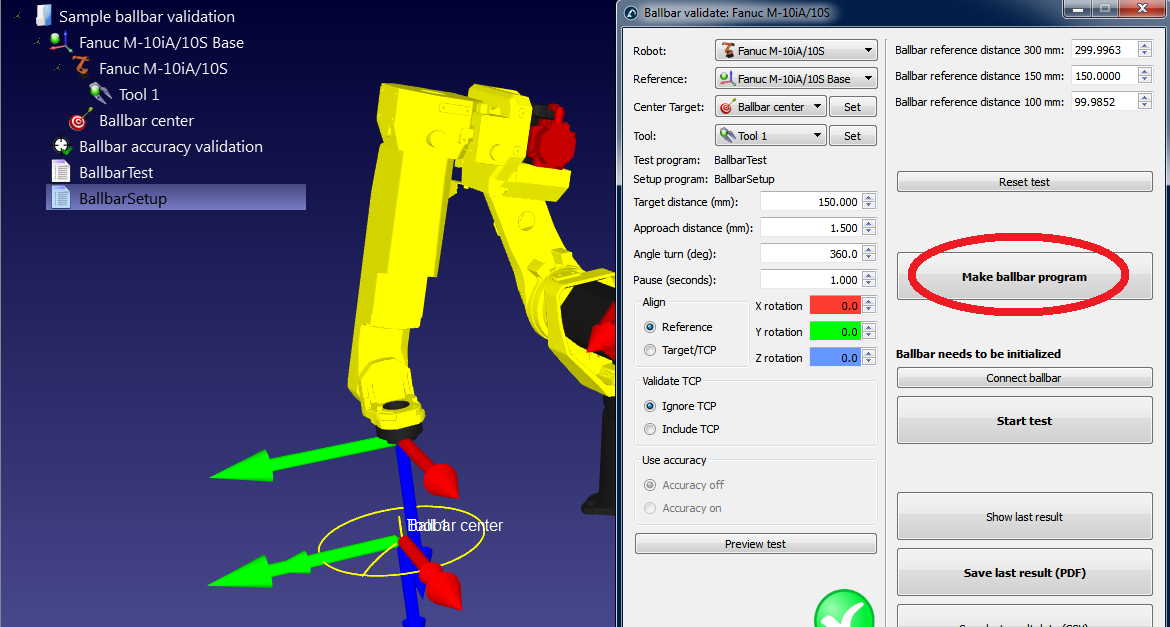
5.Genera programmi:
a.Seleziona Crea programma ballbar e il programma sarà creato. In realtà due programmi appariranno:
i.BallbarSetup: Questo programma è usato per posizionare il punto di pivot (centro del cerchio) nella stessa posizione precedente
ii.BallbarTest: Questo programma è usato per fare il cerchio attorno al punto di pivot per l'acquisizione dei dati.
b.Fai doppio click nel programma creato. RoboDK simulareà il robot usando i programmi.
Se il ballbar test non è possibile con le impostazioni di default, puoi cambiare i parametri. Guarda la prossima sezione su come modificare queste impostazioni.
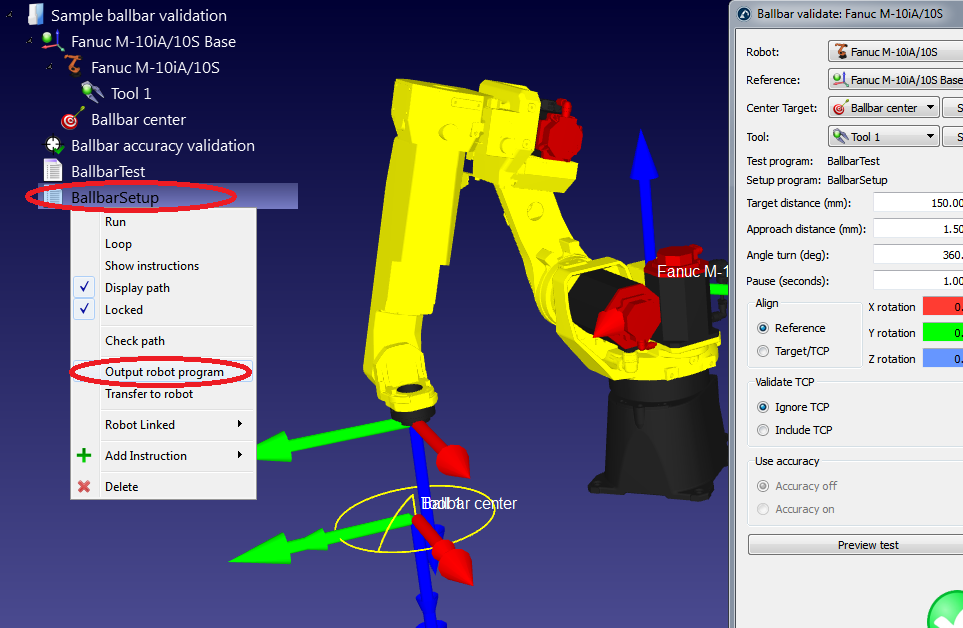
6.Una volta che il programma è di gradimento, i file del programma per il robot posson esser generati:
a.Tasto destro sul programma BallbarTest
b.Seleziona Genera programma robot
c.Ripeti per il programma BallbarSetup (tutti i programmi possono essere generati automaticamente sul desktop premendo F6)
d.Poi i programmi posson esser salvati su USB e trasferiti al robot. La connessione FTP può anch'essa venir usata con la maggiorparte dei robot.
7.Infine, seleziona File➔Salva Stazione per salvare la stazione RoboDK in un singolo file. Il progetto può essere riesumato in RoboDK facendo doppio click sul file (formato RDK)