Modificare i parametri del ballbar test
La prossima schermata può esser visualizzata nel menu dei parametri del ballbar test. Si può accedere facendo doppio click l'elemento Validazione accuratezza Ballbar nella stazione (guarda passaggio precedente)
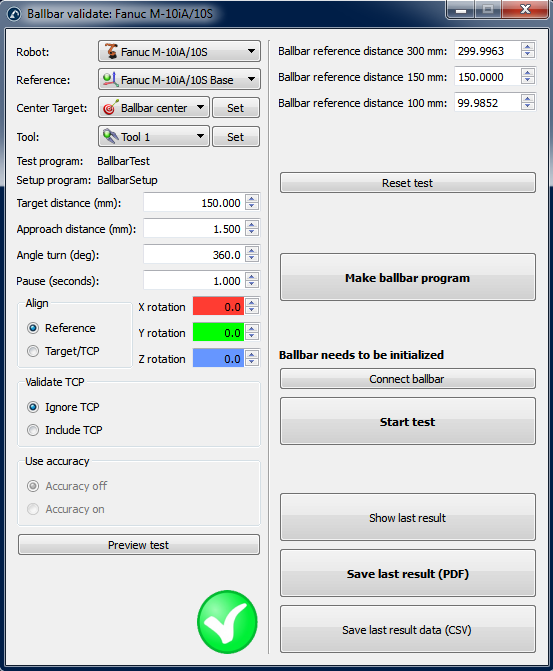
Può essere che il ballbar test non sia possibile di default. La fattibilità del test dipende da tutti questi parametri più i giunti robot del centro della toolcup e la posizione del TCP.
Se il test non è fattibile in primo luogo, possiamo seleziona Anteprima test e vedremo probabilmente una sequenza incompleta. In questo caso possiamo decrementare l'Angle turn (gradi) in modo che il programma sia fattibile. Se questo non è il caso, possiamo ridurre il raggio del cercio Target distance. Con la ballbar Renishaw possiamo testare distanze di 100 mm, 150mm e 300 mm con un errore di +/- 1 mm. La Approach distance (mm) e la pausa Pause (secondi) possono esser lasciate come di default. Questi parametri permettono di trovare l'inizio e la fine del test.
Il piano del test è orientato con rispetto del piano di riferimento della base del robot (Reference nella sezione Align), ciò significa che il piano XY del riferimento robot è usato per creare il cerchio. Possiamo scegliere di fare il test con rispetto del piano di riferimento del tool. In questo caso il piano XY del tool viene utilizzato (quando il centro viene insegnato). Possiamo aggiungere rotazioni addizionali con rispetto di X,Y,Z e/o il piano di riferimento in entrambi i casi.
Se cambiamo certi parametri (ad esempio aggiungiamo il tool nella validazione), il messaggio "Improtant: The TCP must be accurate” apparirà. Ciò significa che i movimenti sono calcolati con rispetto del centro tool. In alternativa, possiamo avere errori TCP e il test sarà fattibile comunque.
Se selezioniamo l'opzione Includi TCP l'orientamento del tool cambia con i movimenti lungo il cerchio. Questa opzione permette di valutare l'errore del robot più il tool in un sistema. In alternativa, possiamo controllare gli errori solamente del robot selezionando Ignora TCP