Introduzione
L'ISO standard “ISO9283: Manipulating industrial robots - Performance criteria and related test methods” descrive test per valutare la performance di robot industriali. Tra le altre cose, descrive alcune procedure per misurare propriamente l'accuratezza, la repetibilità e l'accuratezza del percorso.
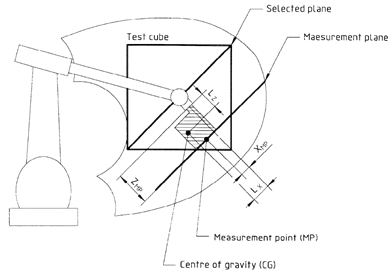
In accordo alla norma ISO9283, tutti i test devono essere fatti all'interno del così detto cubo di test ISO. Il cubo di test ISO dovrebbe essere il più largo cubo che può inserirsi dentro lo spazio di lavoro del robot. In più l'accuratezza e repetibilità devono essere misurate a 5 diverse configurazioni 30 volte. È saputo che 5 configurazioni non sono abbastanza per fornire un appropriata misurazione dell'accuratezza per robot moderni.
Molti produttori forniscono solamente l'accuratezza del robot se è stato calibrato, in più, utilizzano almeno 100 diverse configurazioni per fornire statistiche adeguate. Robot Industriali sono molto repetibili ma non accurati; dunque, l'accuratezza di un robot industriale deve essere migliorata tramite la calibrazione.
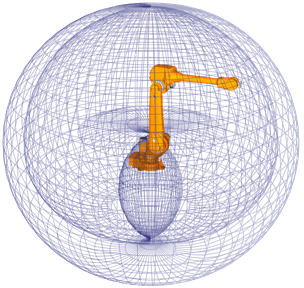
Typical robot workspace in the 80s Typical modern robot workspace
Tuttavia, la norma ISO9283 è spesso usata per repetibilità e accuratezza percorso anche se il robot non è stato calibrato.

È raccomandato guardare questo video che mostra il test di accuratezza percorso con RoboDK:
RoboDK può anche esser utilizzato per calibrare i robot come anche testare le loro performance prima e dopo la calibrazione. Infine, RoboDK può anche essere usato per testare l'accuratezza del robot prima e dopo la calibrazione con il test ballbar.