Percorso Accuratezza
Per eseguire il test di accuratezza percorso è richiesto avere il programma robot creato con RoboDK, come il programma ISO9283 creato dall'utilità Crea cubo ISO. Possiamo generare programmi robot specifici per produttore selezionando il programma e premendo F6(o selezionando Programma➔Genera programma). In alternativa, è possibile usare ogni altro programma creato in RoboDK (ad esempio una line dritta, un cerchio o un quadrato)
È anche richiesto avere un sistema di misurazione in modo da tener traccia della posizione dell'end effector e fornire le misurazioni di posizione con rispetto del piano di riferimento. È richiesto usare le procedure di setup della base e del robot in RoboDK (richieste per eseguire test di calibrazione o accuratezza) per identificare il piano di riferimento della base e del tool.
I dati della misurazione devono essere acquisiti mentre si muove il robot lungo il programma. Le misurazioni dovrebbero esser registrate in continuazione, usando il software di default fornito dal produttore o il sistema di misurazione. È richiesto esportare le misurazioni come file CSV o TXT. Questi file devono contenere dati di posizione X,Y,Z come anche il tempo per ogni movimento. Opzionalmente, queste misurazioni possono contenere gli orientamenti del tool con rispetto della base.
Per iniziare un progetto di validazione percorso in RoboDK:
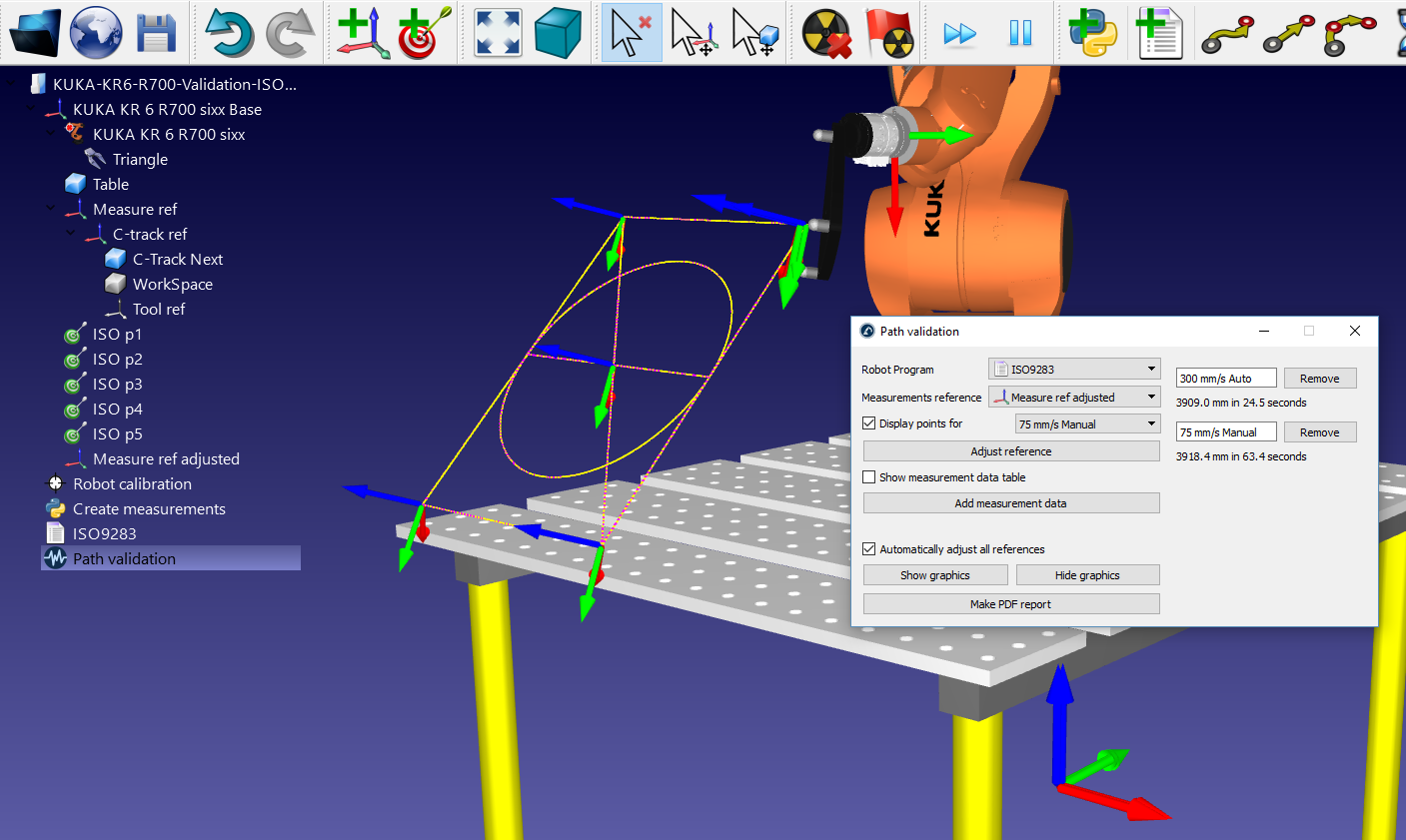
1.Seleziona Utilità➔Test accuratezza percorso, velocità e accelerazione (ISO 9283)
2.Seleziona il programma usato per la validazione dal menu a tendina
3.Fornisci il piano di riferimento usato nelle misurazioni
4.Importa i dati di misurazione selezionando Aggiungi dati di misurazioni. In alternativa, è possibile trascinare il file CSV o TXT contenenti le misurazioni nella finestra di validazione percorso.
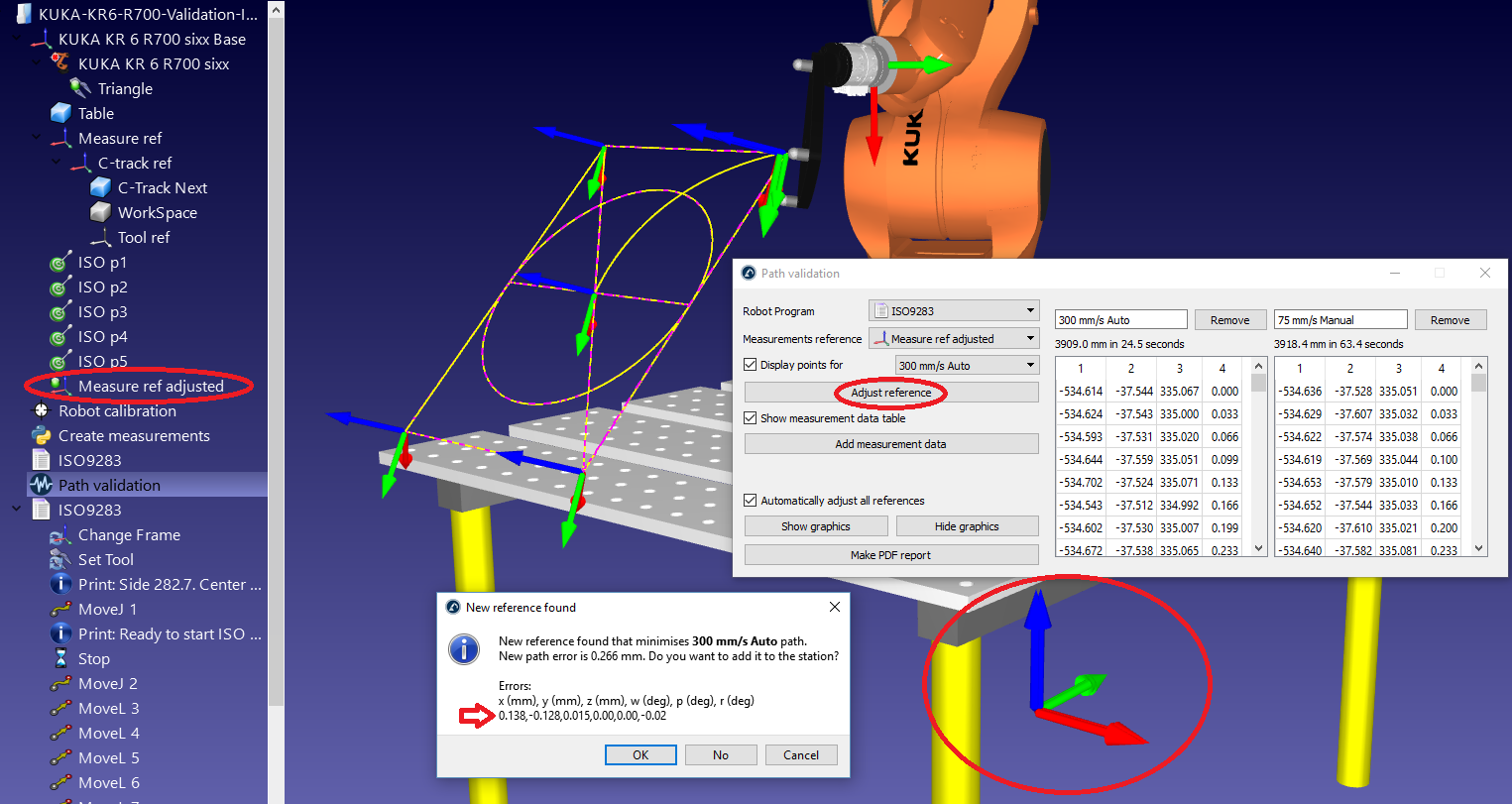
Infine, seleziona Crea report PDF per generare un PDF con le statistiche e grafici riguardo all'accuratezza del percorso, velocità e accelerazione. È possibile avviare lo stesso test più volte sotto diverse condizioni (diverse velocità, diversi valori di raccordo, payload, ...) per comparare questi parametri nello stesso report.
I punti di misurazione posson esser visualizzati in viola. Queste misurazioni dovrebbero corrispondere con il tracciato giallo che descrive il tracciato ideale che il robot deve seguire. Le statistiche fornite da RoboDK sono le differenze tra questi due percorsi.
Se il piano di riferimento non è propriamente definito i punti di misurazione non corrispondono al tracciato giallo. Ciò può accadere per molte ragioni, ad esempio una cattiva definizione del piano di riferimeno o una differente definizione del tool. In questo caso selezionare Aggiusta riferimento cercherà di far combaciare al meglio i due percorsi.