Risultati
Una volta che il test di accuratezza percorso è completato è possibile ottenere un report PDF selezionando Crea report PDF dalla finestra Validazione percorso. Ciò genererà un PDF con alcune statistiche e grafici riguardo all'accuratezza percorso, velocità ed accelerazione.
I risultati del test preparati nella precedente sezione sono mostrati nelle seguenti immagini. In questo esempio, il programma ISO 9283 è stato avviato in due modi:
●Modalità manuale a 75 mm/s
●Modalità automatica a 300 mm/s
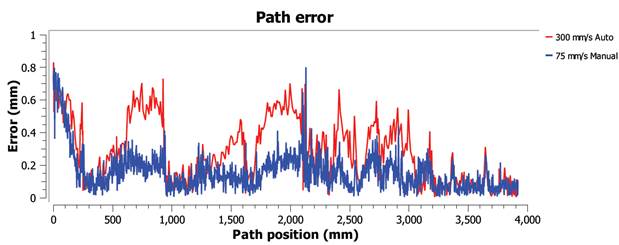
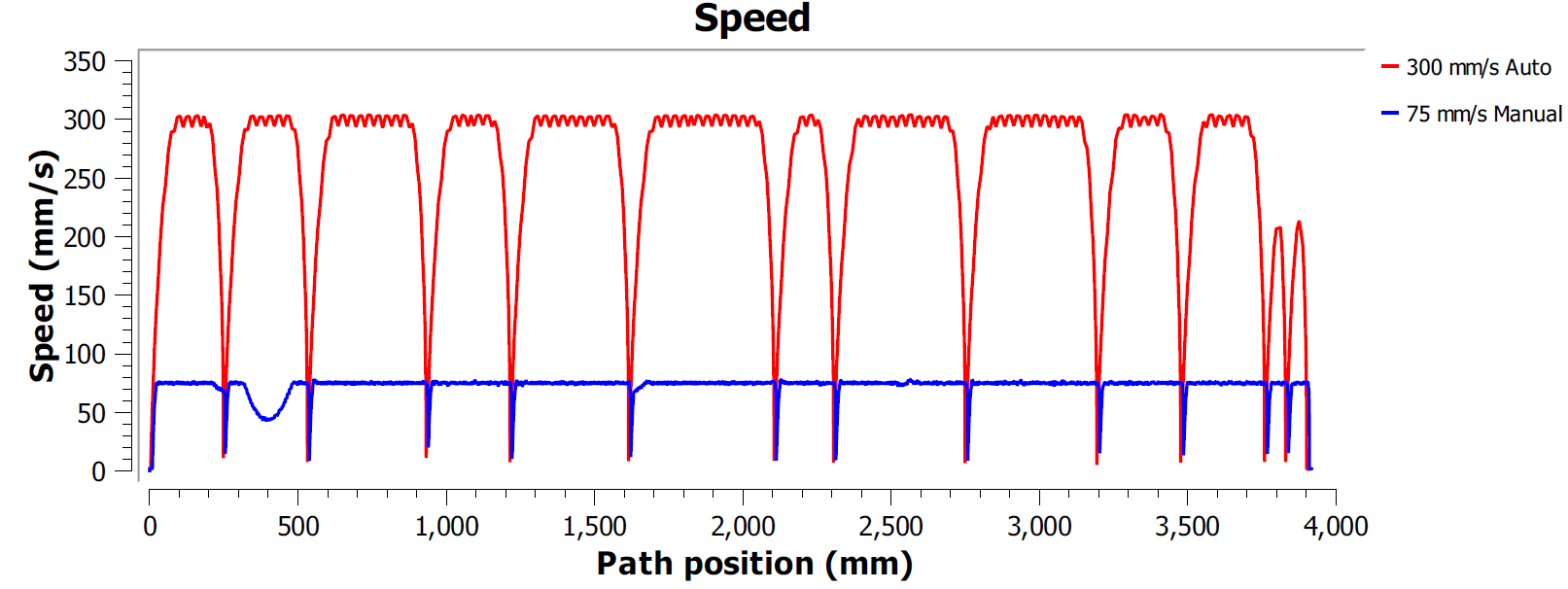
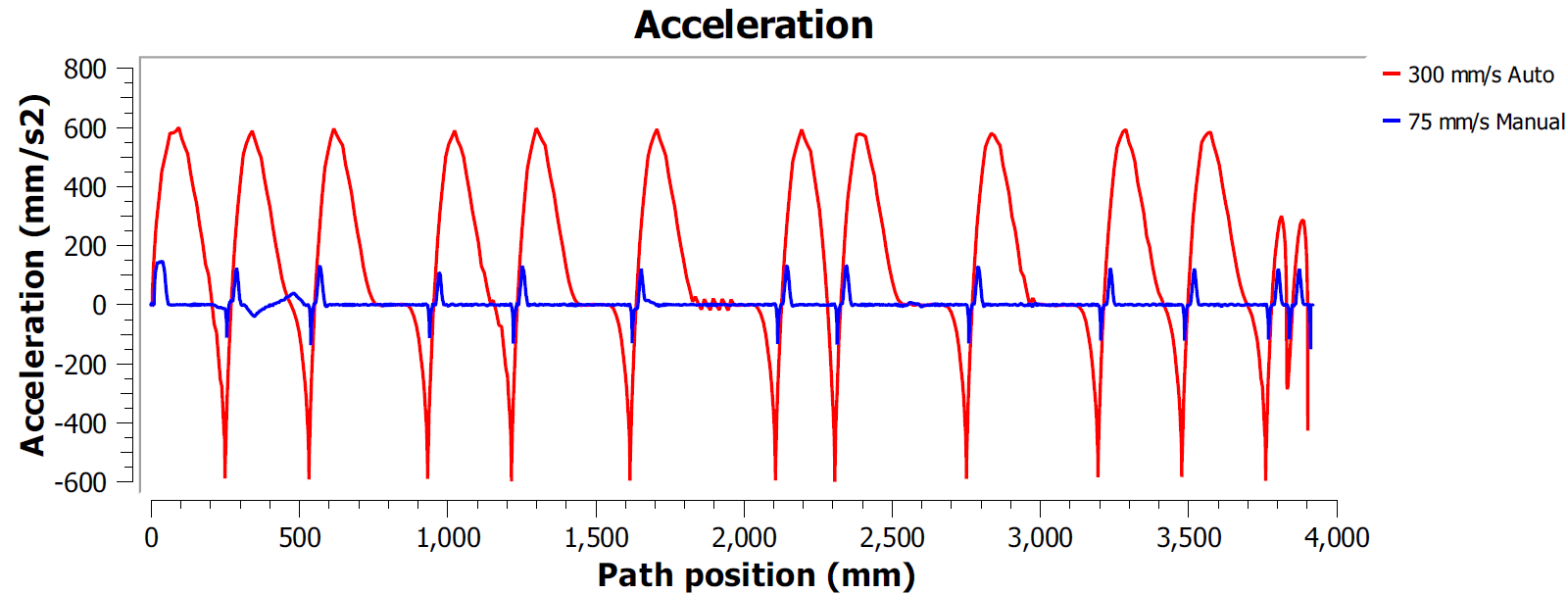
In questo esempio, entrambi i programmi sono stati generati usando l'opzione Accuratezza precisa. Ciò significa che il robot si fermava ad ogni punto per rendere il percorso il più accurato possibile. In questo caso, è tipico osservare grandi accelerazioni e decellerazioni lungo il percorso perchè la velocità deve essere zero alla fine di ogni linea o movimento circolare.
Molti produttori robot offrono opzioni di raccordo per evitare questo effetto e addolcire gli angoli. Per esempio ABB lo chiama ZoneData e permette di specificare una zona di accuratezza dove il controller ha il permesso di addolcire gli spigoli, Fanuc la chia,a CNT e permette di specificare una percentuale di addolcimento proporzionale alla velocità, KUKA offre l'istruzione $ADVANCE con C_DIS e Universal Robot permette di specificare un raggio di raccordo)
Dunque, il test di accuratezza tracciato permette di trovare la buona compensazione tra mantenere una velocità costante mentre manteniamo accettabili i livelli di accuratezza vicini agli spigoli del tracciato.
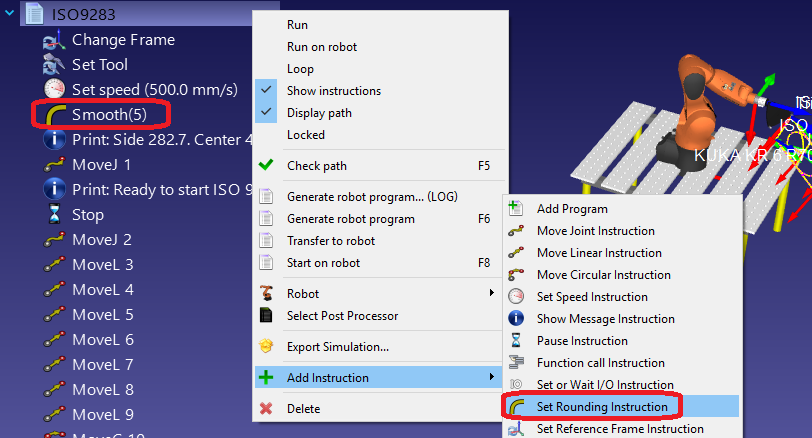
È possibile specificare il parametro di raccordo in RoboDK come anche nella velocità del programma. Per modificare un programma per un tale test:
1.Tasto destro sul programma
2.Seleziona Mostra Istruzioni
3.Seleziona la prima o seconda istruzione
4.Seleziona Programma➔Istruzione Imposta Raccordo per specificare un accuratezza del raccordo
5.Seleziona Programma➔Istruzione Imposta Velocità per specificare la velocità