Setup Offline
È raccomandato costruire un ambiente virtuale del setup reale in RoboDK per preparare il percorso e il posizionamento per il test. Ciò può esser fatto prima di avere il robot e il tracker, solamente usando il computer con installato RoboDK. Esempi del setup per la calibrazione RoboDK e la validazione del percorso posson esser scaricati dalla cartella:
https://www.robodk.com/downloads/calibration/
RoboDK ha un'utilità per generare le configurazioni e percorsi raccomandati come scritto nello standard ISO9283. Per usare questa utilità:
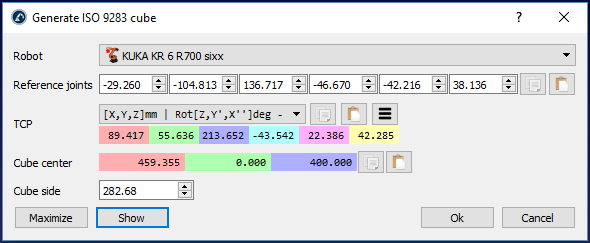
1.Utilità➔Crea cubo ISO 9283 (bersagli e percorso)
2.Immetti i giunti di riferimento (posizione robot dove il tool fronteggia il tracker)
3.Aggiusta la posizione e la dimensione del cubo
4.Seleziona OK
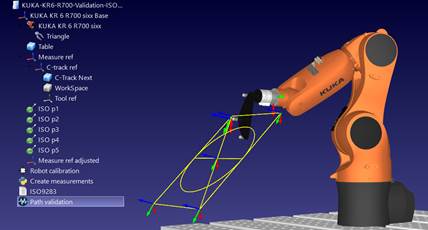
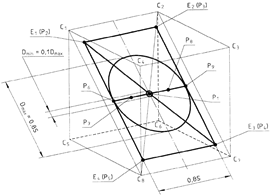
Ciò creerà i 5 bersagli descritti dalla norma ISO come anche il tracciato raccomandato per l'accuratezza del percorso test. Questi bersagli e percorso rimarranno dentro il cubo localizzato di fronte al robot. Possiamo impostare il lato desiderato del cubo come anche muovere il centro (bersaglio ISO p1) e i riferimenti giunti che definiranno l'orientamento del percorso. È anche possibile massimizzare le dimensioni del cubo per trovare il cubo più largo che sta nello spazio di lavoro del robot.
Una stazione di esempio con le opzioni di calibrazione robot e validazione robot è mostrata nella seguente immagine.