ISO9283 Performance Testing
Introduzione
L'ISO standard “ISO9283: Manipulating industrial robots - Performance criteria and related test methods” descrive test per valutare la performance di robot industriali. Tra le altre cose, descrive alcune procedure per misurare propriamente l'accuratezza, la repetibilità e l'accuratezza del percorso.
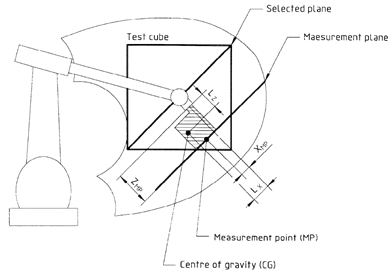
In accordo alla norma ISO9283, tutti i test devono essere fatti all'interno del così detto cubo di test ISO. Il cubo di test ISO dovrebbe essere il più largo cubo che può inserirsi dentro lo spazio di lavoro del robot. In più l'accuratezza e repetibilità devono essere misurate a 5 diverse configurazioni 30 volte. È saputo che 5 configurazioni non sono abbastanza per fornire un appropriata misurazione dell'accuratezza per robot moderni.
Molti produttori forniscono solamente l'accuratezza del robot se è stato calibrato, in più, utilizzano almeno 100 diverse configurazioni per fornire statistiche adeguate. Robot Industriali sono molto repetibili ma non accurati; dunque, l'accuratezza di un robot industriale deve essere migliorata tramite la calibrazione.
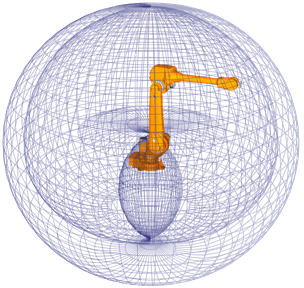
Typical robot workspace in the 80s Typical modern robot workspace
Tuttavia, la norma ISO9283 è spesso usata per repetibilità e accuratezza percorso anche se il robot non è stato calibrato.

È raccomandato guardare questo video che mostra il test di accuratezza percorso con RoboDK:
RoboDK può anche esser utilizzato per calibrare i robot come anche testare le loro performance prima e dopo la calibrazione. Infine, RoboDK può anche essere usato per testare l'accuratezza del robot prima e dopo la calibrazione con il test ballbar.
Requisiti
I seguenti oggetti sono richiesti per installare RoboDK per eseguire propriamente il test di accuratezza percorso:
1.Uno o più robot industriali
2.Un sistema di misurazione: ogni tracker laser come Leica, API o Faro e un CMM ottico come C-Track di Creaform dovrebbero funzionare
3.RoboDK deve essere installato ed una licenza adeguata per test ISO9283 è richiesta. Per una licenza di rete, una connessione ad internet è necessaria. Per installare o aggiornare RoboDK:
a.Scarica RoboDK dalla sezione Download
https://robodk.com/download
b.Imposta i driver dei sistemi di misurazione (non richiesto per Creaform Optical CMM)
Estrai e copia la cartella adeguata:
API Laser tracker: https://robodk.com/downloads/private/API.zip (OTII e Radian trackers)
Faro Laser Tracker: https://robodk.com/downloads/private/Faro.zip (tutti Faro Trackers)
Leica Laser Tracker: https://robodk.com/downloads/private/Leica.zip (tutti Leica Trackers)
nella cartella: C:/RoboDK/api/
Setup Offline
È raccomandato costruire un ambiente virtuale del setup reale in RoboDK per preparare il percorso e il posizionamento per il test. Ciò può esser fatto prima di avere il robot e il tracker, solamente usando il computer con installato RoboDK. Esempi del setup per la calibrazione RoboDK e la validazione del percorso posson esser scaricati dalla cartella:
https://www.robodk.com/downloads/calibration/
RoboDK ha un'utilità per generare le configurazioni e percorsi raccomandati come scritto nello standard ISO9283. Per usare questa utilità:
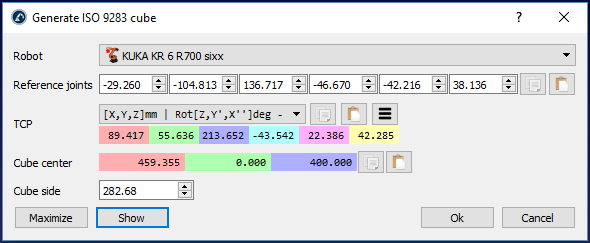
1.Utilità➔Crea cubo ISO 9283 (bersagli e percorso)
2.Immetti i giunti di riferimento (posizione robot dove il tool fronteggia il tracker)
3.Aggiusta la posizione e la dimensione del cubo
4.Seleziona OK
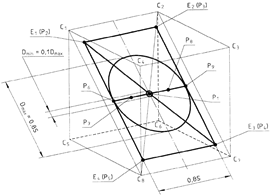
Ciò creerà i 5 bersagli descritti dalla norma ISO come anche il tracciato raccomandato per l'accuratezza del percorso test. Questi bersagli e percorso rimarranno dentro il cubo localizzato di fronte al robot. Possiamo impostare il lato desiderato del cubo come anche muovere il centro (bersaglio ISO p1) e i riferimenti giunti che definiranno l'orientamento del percorso. È anche possibile massimizzare le dimensioni del cubo per trovare il cubo più largo che sta nello spazio di lavoro del robot.
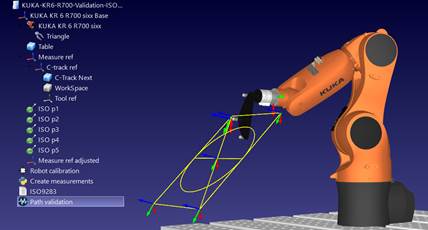
Una stazione di esempio con le opzioni di calibrazione robot e validazione robot è mostrata nella seguente immagine.
Accuratezza e Repetibilità Posizionamento
La stessa procedura usata per la validazione dell'accuratezza durante la calibrazione robot può anche essere usata per testare l'accuratezza del posizionamento. Statistiche di repetibilità possono essere ottenute se le misurazioni sono prese sequenzialmente dallo stesso gruppo di punti. L'unica differenza tra fare solamente la validazione o la calibrazione e validazione è che la prima non richiede una licenza calibrazione.
Per effetturare tale validazione dovresti selezionare dal menu:
●Utilità➔Test accuratezza & repetibilità (ISO 9283)
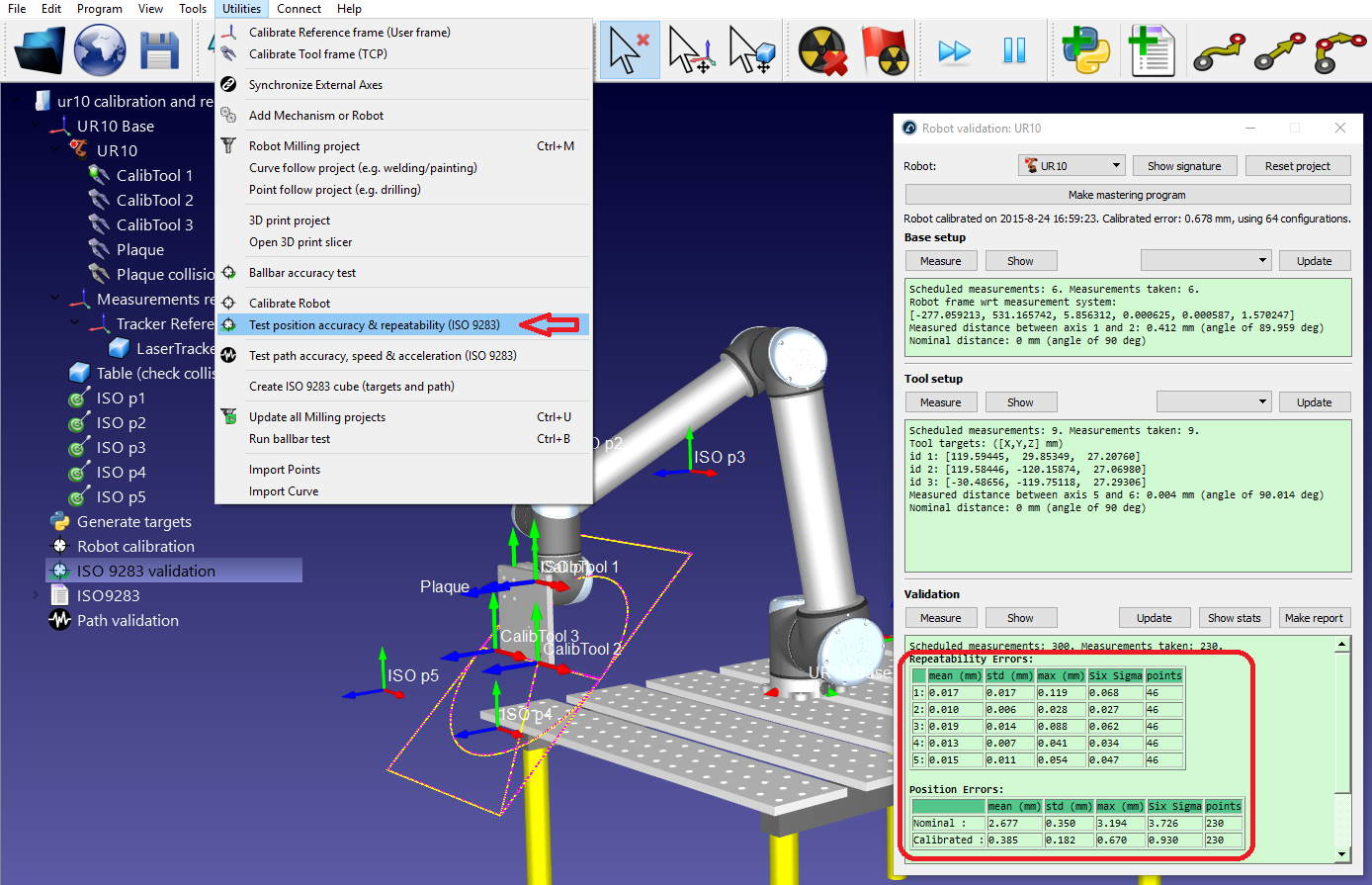
Questi test richiedono di identificare il riferimento della base del robot con rispetto del piano di riferimento delle misurazioni (setup base) e anche il piano del tool con rispetto della flangia robot (setup tool)
È possibile ottenere un report PDF quando i test dell'accuratezza e della repetibilità del posizionamento sono completati.
Percorso Accuratezza
Per eseguire il test di accuratezza percorso è richiesto avere il programma robot creato con RoboDK, come il programma ISO9283 creato dall'utilità Crea cubo ISO. Possiamo generare programmi robot specifici per produttore selezionando il programma e premendo F6(o selezionando Programma➔Genera programma). In alternativa, è possibile usare ogni altro programma creato in RoboDK (ad esempio una line dritta, un cerchio o un quadrato)
È anche richiesto avere un sistema di misurazione in modo da tener traccia della posizione dell'end effector e fornire le misurazioni di posizione con rispetto del piano di riferimento. È richiesto usare le procedure di setup della base e del robot in RoboDK (richieste per eseguire test di calibrazione o accuratezza) per identificare il piano di riferimento della base e del tool.
I dati della misurazione devono essere acquisiti mentre si muove il robot lungo il programma. Le misurazioni dovrebbero esser registrate in continuazione, usando il software di default fornito dal produttore o il sistema di misurazione. È richiesto esportare le misurazioni come file CSV o TXT. Questi file devono contenere dati di posizione X,Y,Z come anche il tempo per ogni movimento. Opzionalmente, queste misurazioni possono contenere gli orientamenti del tool con rispetto della base.
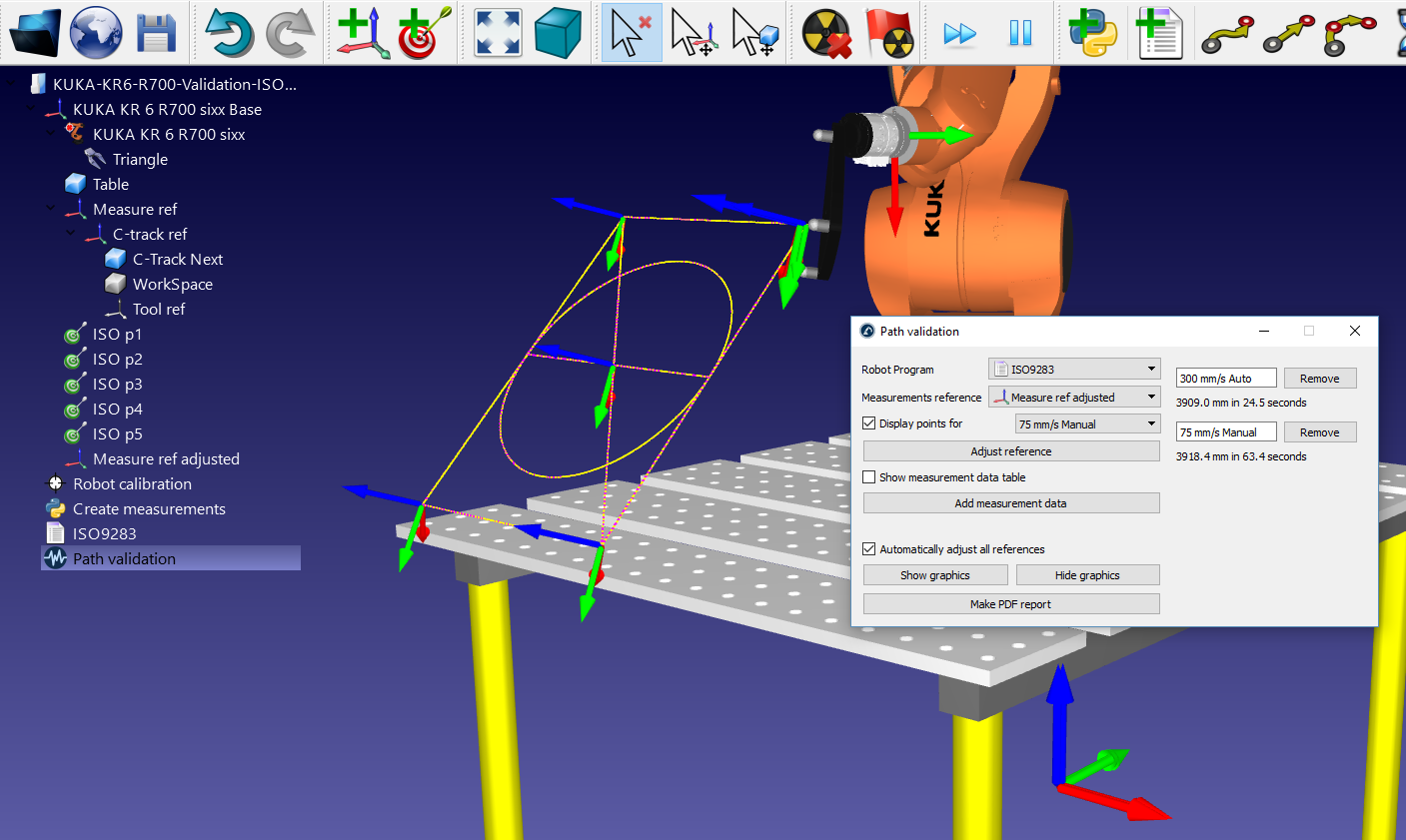
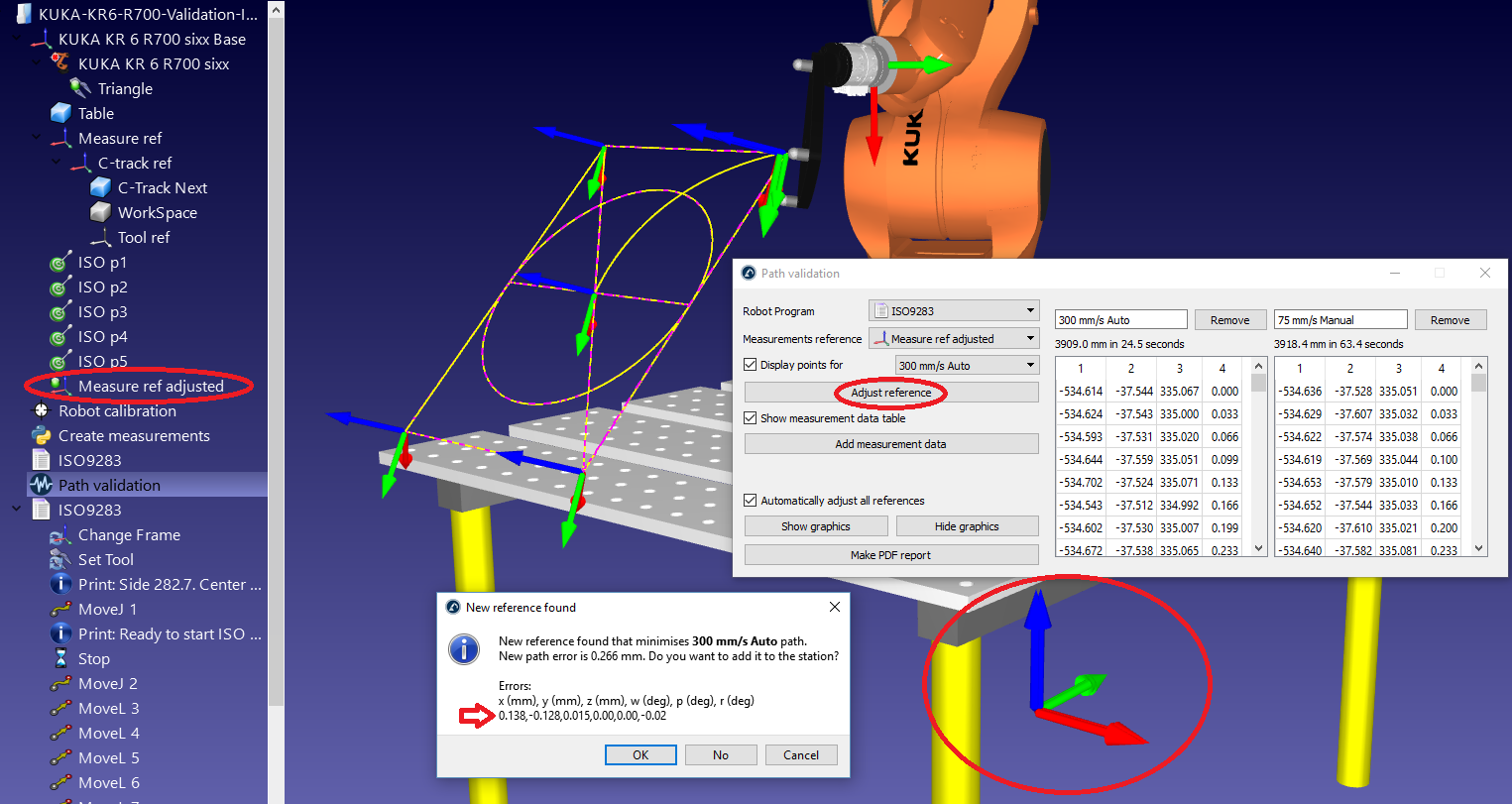
Per iniziare un progetto di validazione percorso in RoboDK:
1.Seleziona Utilità➔Test accuratezza percorso, velocità e accelerazione (ISO 9283)
2.Seleziona il programma usato per la validazione dal menu a tendina
3.Fornisci il piano di riferimento usato nelle misurazioni
4.Importa i dati di misurazione selezionando Aggiungi dati di misurazioni. In alternativa, è possibile trascinare il file CSV o TXT contenenti le misurazioni nella finestra di validazione percorso.
Infine, seleziona Crea report PDF per generare un PDF con le statistiche e grafici riguardo all'accuratezza del percorso, velocità e accelerazione. È possibile avviare lo stesso test più volte sotto diverse condizioni (diverse velocità, diversi valori di raccordo, payload, ...) per comparare questi parametri nello stesso report.
I punti di misurazione posson esser visualizzati in viola. Queste misurazioni dovrebbero corrispondere con il tracciato giallo che descrive il tracciato ideale che il robot deve seguire. Le statistiche fornite da RoboDK sono le differenze tra questi due percorsi.
Se il piano di riferimento non è propriamente definito i punti di misurazione non corrispondono al tracciato giallo. Ciò può accadere per molte ragioni, ad esempio una cattiva definizione del piano di riferimeno o una differente definizione del tool. In questo caso selezionare Aggiusta riferimento cercherà di far combaciare al meglio i due percorsi.
Risultati
Una volta che il test di accuratezza percorso è completato è possibile ottenere un report PDF selezionando Crea report PDF dalla finestra Validazione percorso. Ciò genererà un PDF con alcune statistiche e grafici riguardo all'accuratezza percorso, velocità ed accelerazione.
I risultati del test preparati nella precedente sezione sono mostrati nelle seguenti immagini. In questo esempio, il programma ISO 9283 è stato avviato in due modi:
●Modalità manuale a 75 mm/s
●Modalità automatica a 300 mm/s
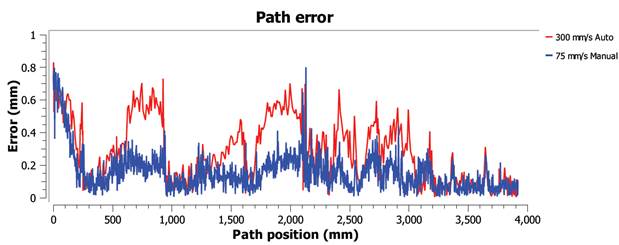
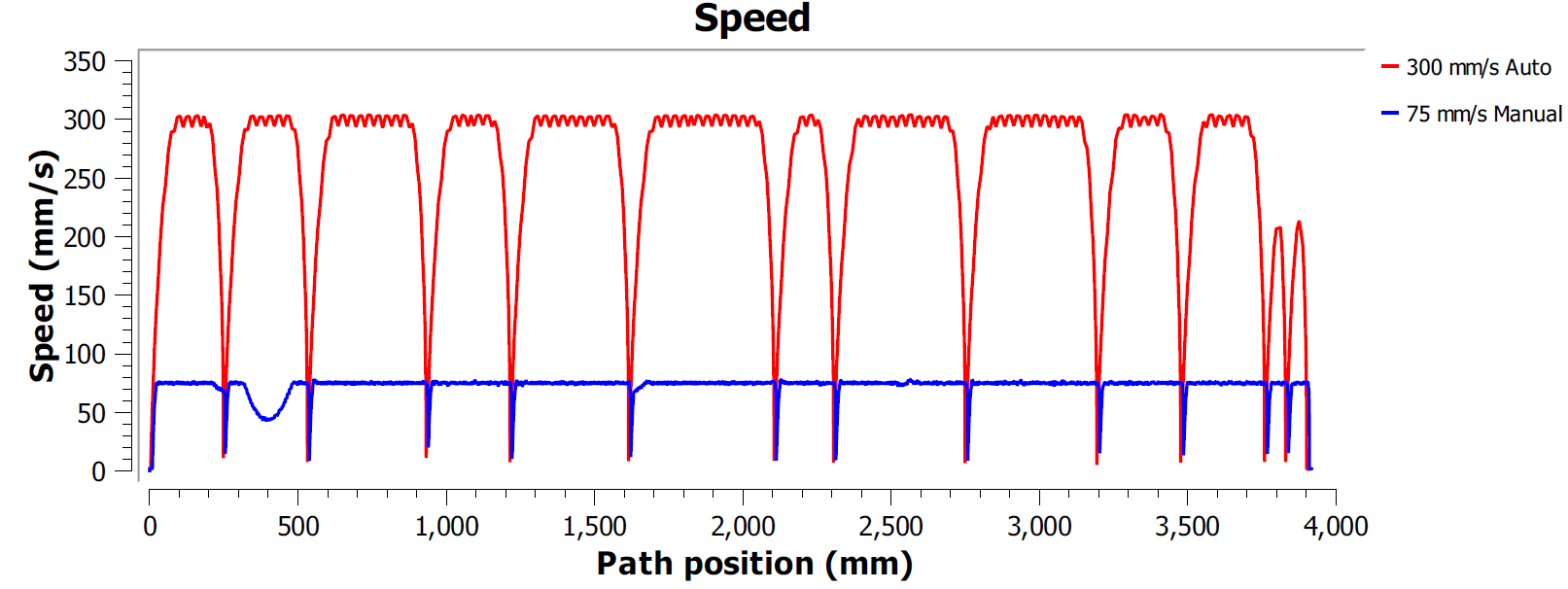
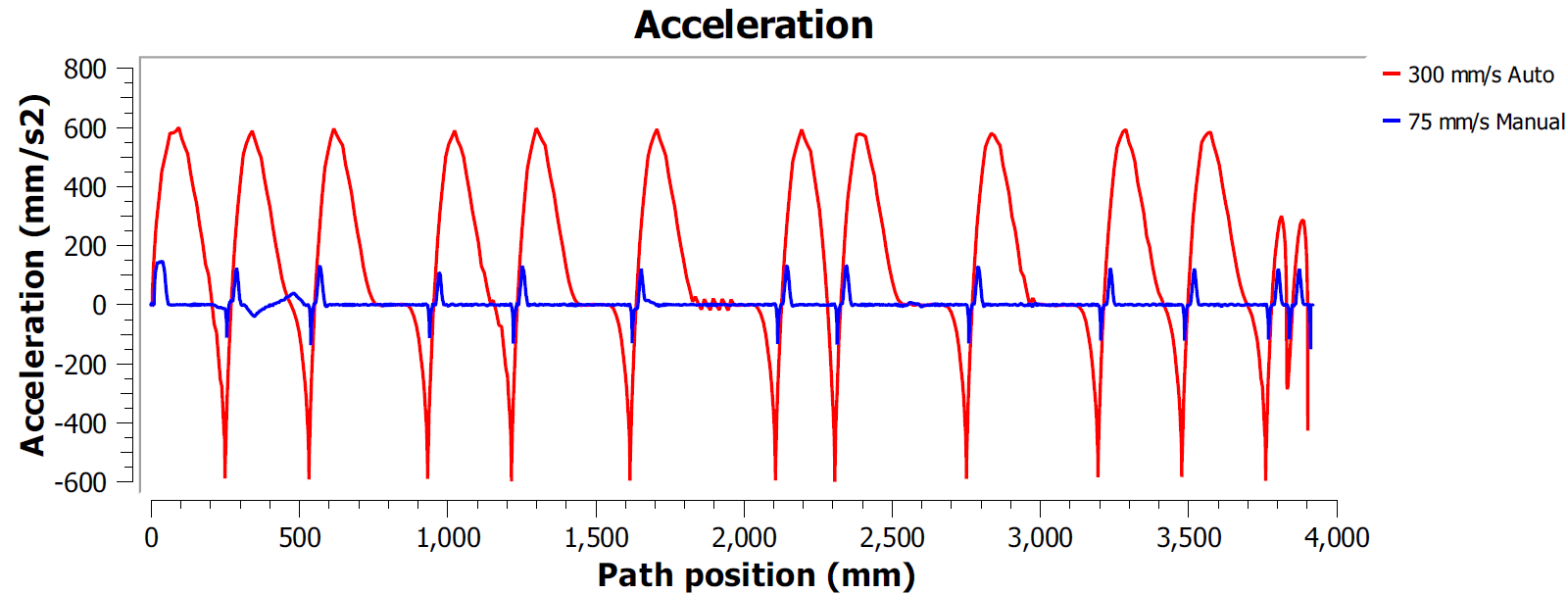
In questo esempio, entrambi i programmi sono stati generati usando l'opzione Accuratezza precisa. Ciò significa che il robot si fermava ad ogni punto per rendere il percorso il più accurato possibile. In questo caso, è tipico osservare grandi accelerazioni e decellerazioni lungo il percorso perchè la velocità deve essere zero alla fine di ogni linea o movimento circolare.
Molti produttori robot offrono opzioni di raccordo per evitare questo effetto e addolcire gli angoli. Per esempio ABB lo chiama ZoneData e permette di specificare una zona di accuratezza dove il controller ha il permesso di addolcire gli spigoli, Fanuc la chia,a CNT e permette di specificare una percentuale di addolcimento proporzionale alla velocità, KUKA offre l'istruzione $ADVANCE con C_DIS e Universal Robot permette di specificare un raggio di raccordo)
Dunque, il test di accuratezza tracciato permette di trovare la buona compensazione tra mantenere una velocità costante mentre manteniamo accettabili i livelli di accuratezza vicini agli spigoli del tracciato.
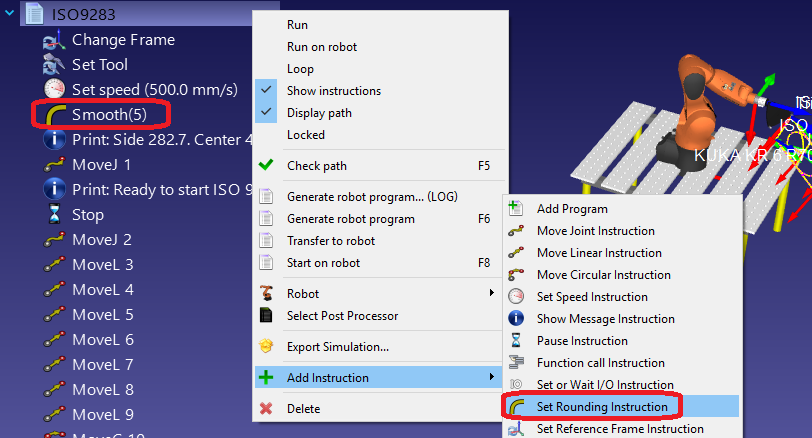
È possibile specificare il parametro di raccordo in RoboDK come anche nella velocità del programma. Per modificare un programma per un tale test:
1.Tasto destro sul programma
2.Seleziona Mostra Istruzioni
3.Seleziona la prima o seconda istruzione
4.Seleziona Programma➔Istruzione Imposta Raccordo per specificare un accuratezza del raccordo
5.Seleziona Programma➔Istruzione Imposta Velocità per specificare la velocità