Recupera il TCP
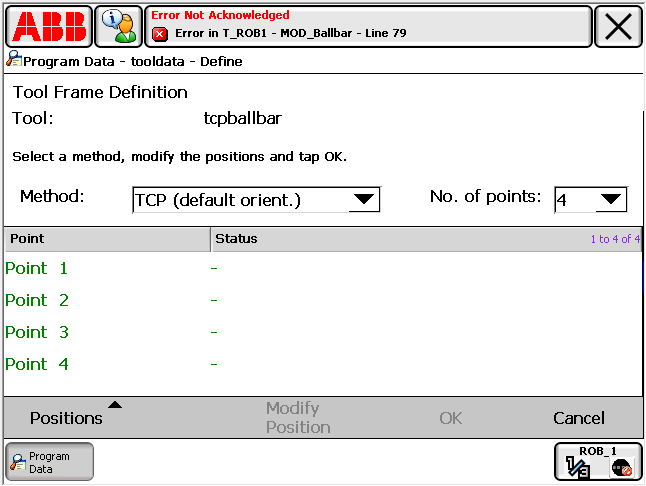
I prossimi passaggi permettono di creare o modificare i tools del robot (TCP, conosciuti anche come tooldata nella programmazione di robot ABB):
1.Seleziona ABB➔Program data➔tooldata (doppio click)
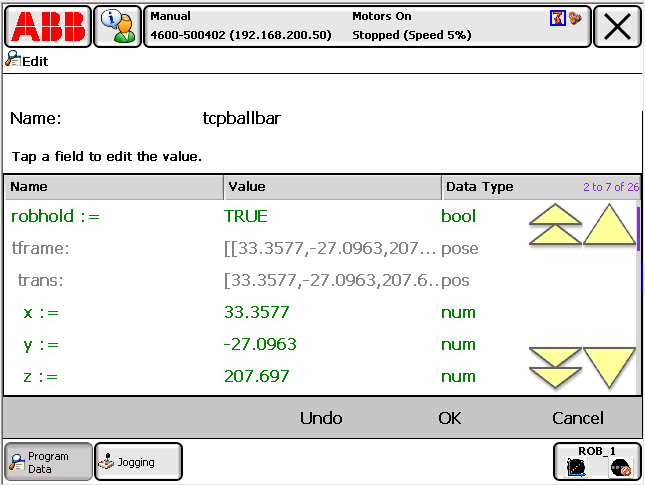
2.È ora possibile creare o modificare le variabili esistenti del tool
3.Una volta che il tool è stato definito nei valori X,Y,Z, può esser ottenuto il TCP