Binari lineari
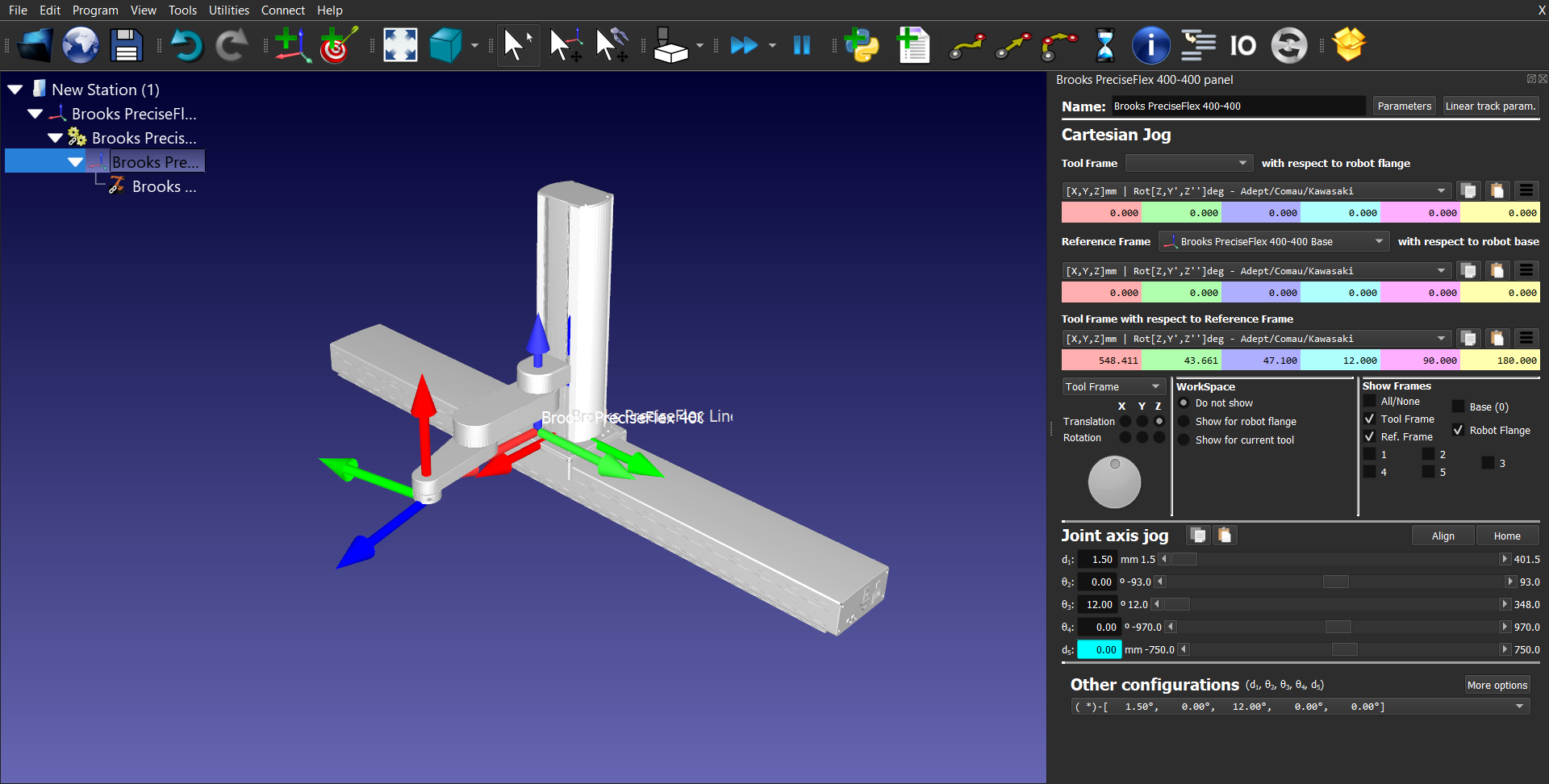
Poiché il telaio di base del robot PreciseFlex non è posizionato sulla base fisica del robot, sono necessari degli offset specifici tra i robot PreciseFlex e le guide lineari PreciseFlex.
Configurazione della guida lineare Brooks PreciseFlex:
a.Brooks PreciseFlex 400: [118, 0, 45.6, 0, 0, 0]
b.Brooks PreciseFlex 3400: [118, 0, 62.6, 0, 0, 0]
Guida lineare Brooks PreciseFlex - configurazione a 90 gradi:
a.Brooks PreciseFlex 400: [101,6, 0, 45,6, 0, 0, 0]
b.Brooks PreciseFlex 3400: [101,6, 0, 62,6, 0, 0, 0]
La guida lineare deve essere sincronizzata affinché il post processor tenga conto della posizione dell'asse. Per maggiori informazioni, consulti la sezione https://robodk.com/doc/en/General.html#SyncAxes.