Post Processor
Questa sezione spiega alcuni suggerimenti relativi alla generazione di programmi per i robot Brooks.
Punto centrale dello strumento (TCP)
Il punto centrale dell'utensile (TCP) in RoboDK e nel controllore deve corrispondere. Se si utilizza un meccanismo di presa, è necessario aggiungere un TCP utilizzando "Aggiungi utensile (TCP)" che si trovi nella posizione prevista. Il nuovo TCP dell'utensile deve corrispondere al TCP del meccanismo di presa. Le informazioni relative al Punto Centrale Utensile (TCP) dei robot Brooks PreciseFlex possono essere trovate accedendo all'Interfaccia Web e seguendo questi passaggi:
1.Admin
2.Impostazione - Database dei parametri
3.Robot
4.Controllo congiunto/cartesiano
5.Parametri dinamici
6.DataID 16051
Pinza
Vedere la sezione precedente Simulazione della pinza su come definire correttamente le istruzioni della pinza compatibili con il post processor. Questo approccio definisce correttamente le posizioni nel progetto GPL, evitando movimenti imprevisti degli assi della pinza.
Rounding
Un valore di ingresso di -1 determina che il robot si fermerà alla fine del movimento e verrà applicato un vincolo di errore di posizione severo (codice GPL: prof1.InRange = 100).
Un valore di ingresso pari a 0 determina che il robot si fermerà alla fine del movimento, ma verrà applicato un piccolo vincolo di errore di posizione (codice GPL: prof1.InRange = 10).
Un valore di ingresso superiore a 0 determina che il robot non si fermerà alla fine del movimento e verrà eseguito un movimento misto (codice GPL: prof1.InRange = -1).
Velocità e accelerazione
Le informazioni relative alle velocità/accelerazioni massime lineari, angolari e dei giunti dei robot Brooks PreciseFlex possono essere trovate accedendo all'Interfaccia Web e seguendo questi passaggi:
1.Admin
2.Impostazione - Database dei parametri
3.Robot
4.Controllo congiunto/cartesiano
5.Parametri dinamici
6.ID dati 2700, 2701, 2702 e 2703
L'utente può impostare gli ingressi delle istruzioni di velocità/accelerazioni di RoboDK utilizzando i valori dei DataID di cui sopra come riferimenti. Il post-processore Precise utilizzerà poi questi valori per calcolare la velocità/accelerazione come percentuali della velocità/accelerazione massima per ogni robot, come richiesto dalla classe Profilo GPL.
Per cambiare i limiti utilizzati dal post processor, può modificare il post processor in base al robot specifico che sta utilizzando. Per impostazione predefinita, il post processor utilizza i limiti dei robot PF400 e PF3400. Per modificare il post processor, faccia riferimento alla sezione https://robodk.com/doc/en/Post-Processors.html#PPEditor della documentazione.
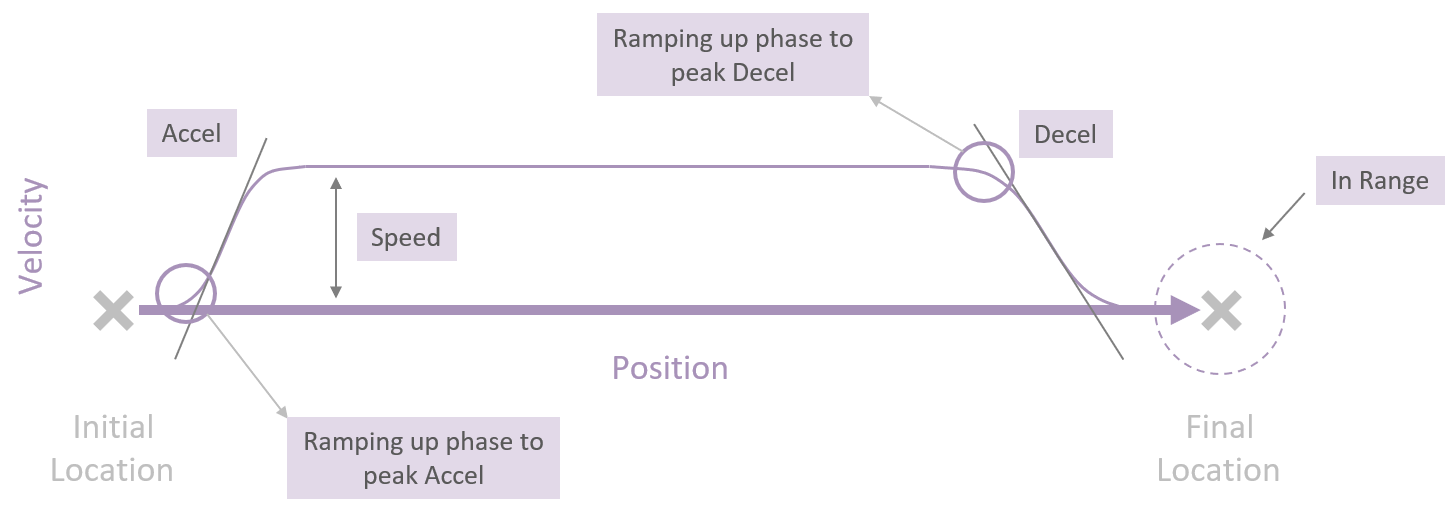
Se si utilizzano valori di ingresso inferiori a 1 con le istruzioni di accelerazione lineare e angolare, questi ingressi saranno utilizzati come durata in secondi per la rampa di accelerazione/decelerazione di picco (codice GPL: prof1.AccelRamp/prof1.DecelRamp = valore di ingresso).
L'immagine sottostante fornisce ulteriori informazioni relative ai concetti scritti sopra e al modo in cui il controllore pianifica le traiettorie che il robot deve seguire.
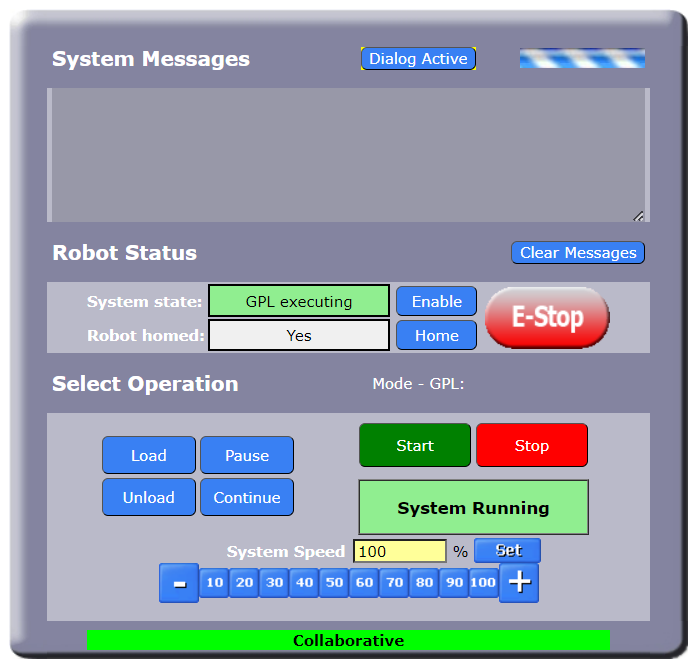
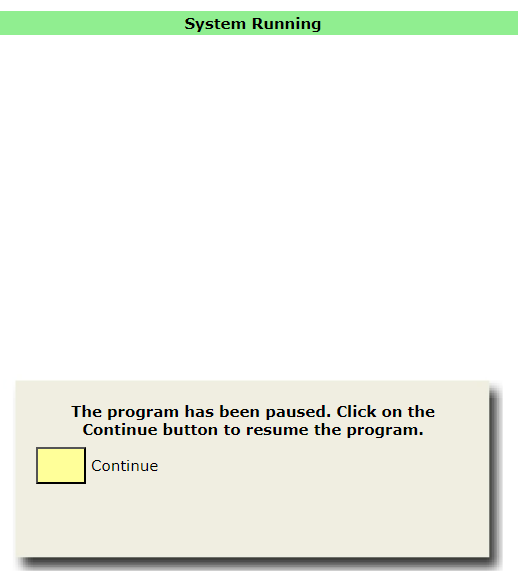
Pausa
L'impostazione di un valore di ingresso maggiore di 0 genererà un comando GPL che metterà in pausa il programma per il tempo definito dal valore di ingresso. Un valore di ingresso negativo aprirà una finestra di dialogo pop-up sul Pannello di controllo dell'operatore dell'interfaccia web e il programma verrà messo in pausa finché l'utente non farà clic sul pulsante "Continua" della finestra di dialogo. Per visualizzare la finestra di dialogo, l'utente deve cliccare sul pulsante "Dialogo attivo" sul Pannello di controllo dell'operatore.