Velocità e accelerazione
Le informazioni relative alle velocità/accelerazioni massime lineari, angolari e dei giunti dei robot Brooks PreciseFlex possono essere trovate accedendo all'Interfaccia Web e seguendo questi passaggi:
1.Admin
2.Impostazione - Database dei parametri
3.Robot
4.Controllo congiunto/cartesiano
5.Parametri dinamici
6.ID dati 2700, 2701, 2702 e 2703
L'utente può impostare gli ingressi delle istruzioni di velocità/accelerazioni di RoboDK utilizzando i valori dei DataID di cui sopra come riferimenti. Il post-processore Precise utilizzerà poi questi valori per calcolare la velocità/accelerazione come percentuali della velocità/accelerazione massima per ogni robot, come richiesto dalla classe Profilo GPL.
Per cambiare i limiti utilizzati dal post processor, può modificare il post processor in base al robot specifico che sta utilizzando. Per impostazione predefinita, il post processor utilizza i limiti dei robot PF400 e PF3400. Per modificare il post processor, faccia riferimento alla sezione https://robodk.com/doc/en/Post-Processors.html#PPEditor della documentazione.
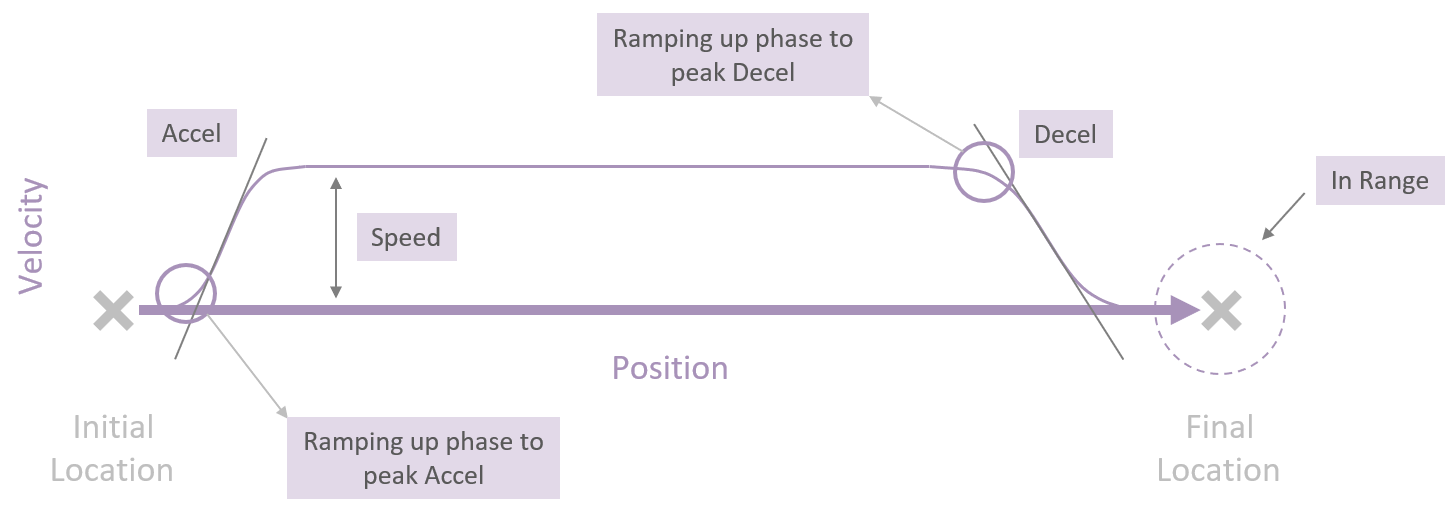
Se si utilizzano valori di ingresso inferiori a 1 con le istruzioni di accelerazione lineare e angolare, questi ingressi saranno utilizzati come durata in secondi per la rampa di accelerazione/decelerazione di picco (codice GPL: prof1.AccelRamp/prof1.DecelRamp = valore di ingresso).
L'immagine sottostante fornisce ulteriori informazioni relative ai concetti scritti sopra e al modo in cui il controllore pianifica le traiettorie che il robot deve seguire.