Robot Comau
Questa sezione della documentazione fornisce una panoramica delle operazioni tipiche quando si utilizza un robot Comau, come la generazione di programmi da RoboDK e il loro caricamento nel controller del robot Comau.
Trasferisca il programma di un robot
Questa sezione la guiderà a caricare un programma nel controller del robot Comau.
Segua questi passaggi per caricare un modulo di programma via FTP nella memoria del programma.
1.Nella scheda di connessione del robot, configuri correttamente l'indirizzo IP. Se il nome utente e la password FTP non sono i valori predefiniti, può configurarli alla voce "Altre opzioni".
2.Quando desidera trasferire un programma, è sufficiente fare clic con il pulsante destro del mouse sul programma e selezionare "Invia a robot".
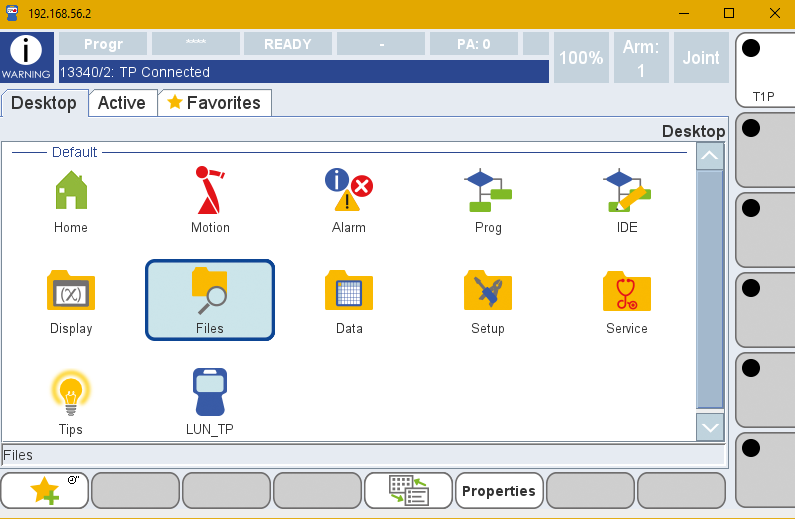
3.Sul controller del robot, vada su "File" nel menu principale di teach pendants.
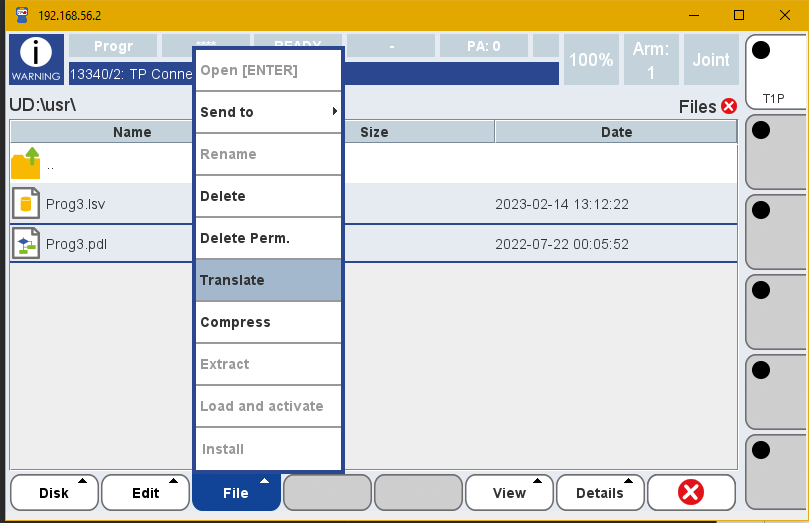
4.Selezioni il programma PDL e il corrispondente LSV, se necessario, e clicchi su File->Traduzione per convertire il programma nella corrispondente versione compilata.
5.I file compilati possono ora essere caricati nella memoria ed eseguiti attraverso l'opzione "Prog" dell'interfaccia principale.
Quando utilizza RoboDK con un robot virtuale in RoboShop, potrebbe voler aumentare il numero massimo di connessioni FTP simultanee, altrimenti il pendente dell'insegnante virtuale si disconnette ogni volta che si trasferisce un file. Questo si può ottenere aprendo un terminale sul robot virtuale ed eseguendo le seguenti azioni.
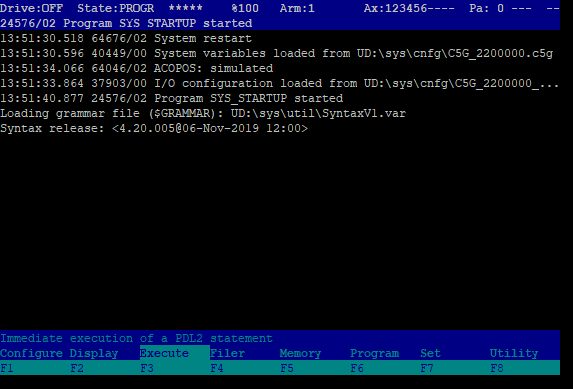
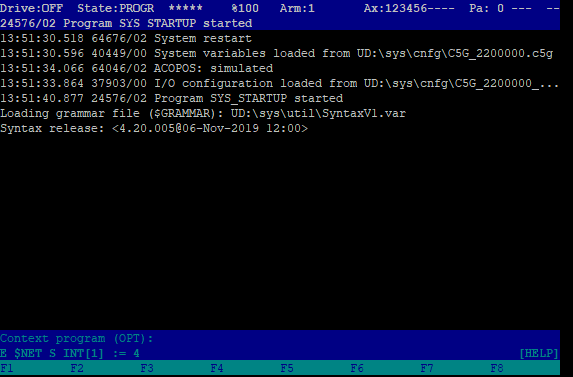
Si rechi al terminale in Roboshop e segua i seguenti passaggi all'interno del terminale del robot:,
1.Selezioni Esegui (F3)
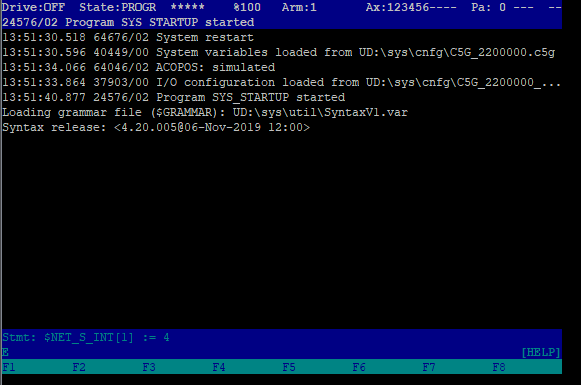
2.Digiti "$NET_S_INT[1] := 4".
3.Premere "Invio" per confermare la dichiarazione
4.Prema "Invio" una seconda volta per eseguire l'istruzione.
Post Processor
Quando si generano programmi robotici per i robot Comau, è importante verificare se il robot è configurato per i programmi MODAL o NODAL.
Per i programmi Nodal, selezioni i seguenti post processor facendo clic con il tasto destro del mouse sul robot e poi cliccando sul pulsante "Seleziona post processor".
●Comau Nodal
Per i programmi modali, selezionare i seguenti post processor facendo clic con il tasto destro del mouse sul robot e poi cliccando sul pulsante "Seleziona post processor", quindi scegliere uno dei seguenti post processor:
●Comau C5G
●Giunti Comau C5G
Driver
Può utilizzare le funzioni di programmazione online con i robot Comau. Affinché le funzioni di programmazione online funzionino, deve impostare il driver sul lato del controllore del robot Comau, eseguendo il file di programma PDL del driver.
Segua queste istruzioni per configurare il driver Comau per RoboDK:
1.Trasferisca il file RoboDKdriver.pdl al controller robot Comau.
2.Avvia manualmente il programma sul robot (converte il robot in un server).
3.Si colleghi al robot da RoboDK.
La porta di comunicazione utilizzata per impostazione predefinita è 1102, ma può cambiarla nel file RoboDKdriver.pdl.