Driver RoboDK per Denso
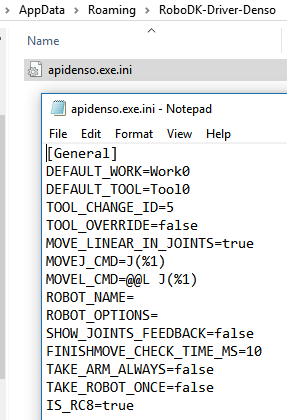
Il driver RoboDK per Denso può essere altamente personalizzato per ottenere un comportamento specifico. Questa personalizzazione può essere effettuata modificando il file ini situato in:
%APPDATA%/RoboDK-Driver-Denso/apidenso.exe.ini
Queste personalizzazioni consentono di specificare il tipo di movimenti o di poter guidare più robot contemporaneamente. Per modificare questo file si può utilizzare qualsiasi editor di testo.
Si possono configurare le seguenti variabili:
●DEFAULT_WORK - Oggetto di lavoro utilizzato di default (stringa variabile).
●DEFAULT_TOOL - Variabile strumento utilizzata per impostazione predefinita.
●TOOL_CHANGE_ID - Variabile utensile di riserva da utilizzare quando impostiamo un nuovo utensile (5=Tool5, ad esempio).
●MOVE_LINEAR_IN_JOINTS - Imponga false per fornire movimenti lineari come bersagli cartesiani.
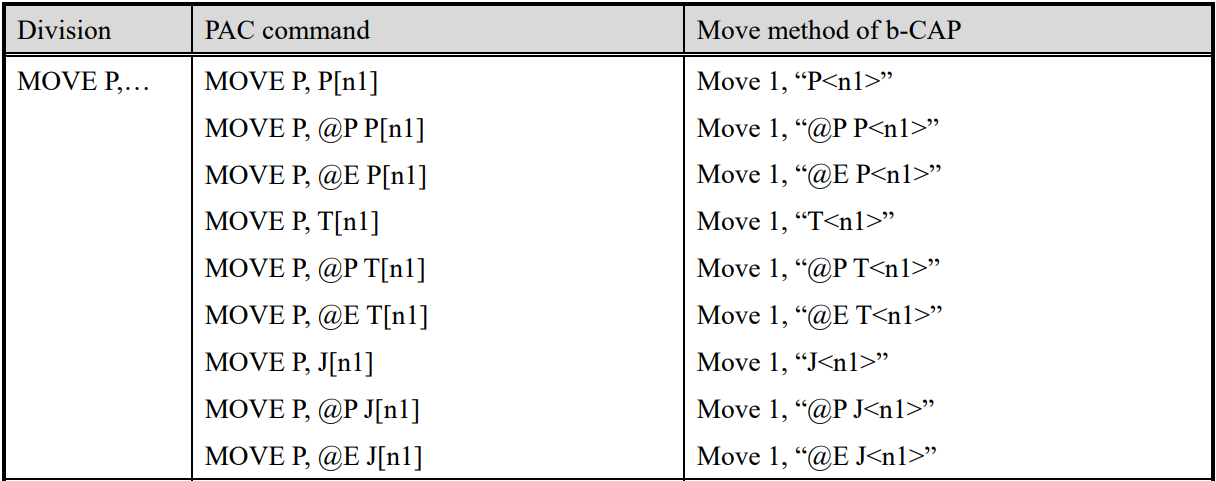
●MOVEJ_CMD - Comando da inviare per un Movimento Congiunto (MoveJ). La tabella seguente fornisce le opzioni consentite.
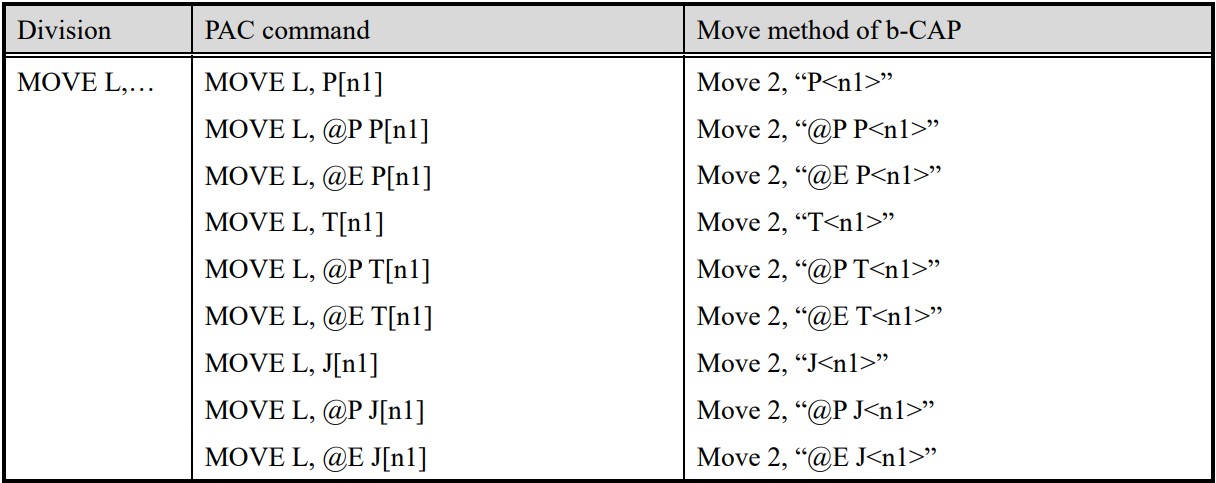
●MOVEL_CMD - Comando da inviare per un Movimento Lineare (MoveL). La tabella seguente fornisce le opzioni consentite.
●ROBOT_NAME - Nome del robot. Specifichi questo nome per selezionare un robot specifico di un controllore.
●ROBOT_OPTIONS - Opzioni del robot per ottenere le risorse del robot. Ad esempio, se stiamo utilizzando il robot slave del controller, dobbiamo specificare ROBOT_OPTIONS="ID=1". L'ID deve essere 0 (predefinito) se vogliamo utilizzare il robot master (robot principale).
●SHOW_JOINTS_FEEDBACK - Impostare su true per vedere il feedback del robot sullo schermo in tempo reale (le prestazioni possono essere più lente).
●FINISH_MOVE_CHECK_MS - Imposta la velocità con cui la posizione del robot deve essere aggiornata sullo schermo quando viene mostrato il feedback dei giunti.
●TAKE_ARMS_ALWAYS - Impostare su true per mantenere le risorse del controllore dopo ogni movimento fino a quando il robot non viene disconnesso (più veloce, ma può portare a risultati inaspettati).
●TAKE_ROBOT_ONCE - Impostare su true per mantenere la risorsa robot dopo ogni movimento mentre il robot è collegato (più veloce, ma può portare a risultati inaspettati).
●IS_RC8 - Impostare su false per collegarsi correttamente ai controllori RC7 e Denso più vecchi.