Eseguire programmi dal PC
I programmi del robot possono essere eseguiti direttamente da RoboDK al robot reale, se è stata stabilita una connessione di rete.
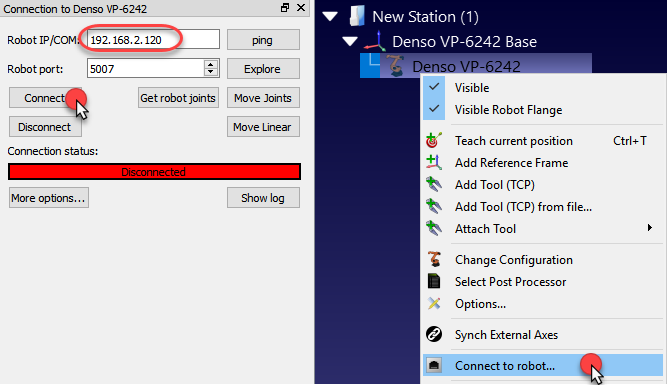
1.Clicchi con il tasto destro del mouse sul robot in RoboDK.
2.Selezionare: 
3.Inserisca l'IP del robot
4.Selezionare Connetti.
Dovrebbe apparire un messaggio verde che indica Pronto se la connessione è riuscita.
Il robot può essere spostato selezionando Ottieni giunti del robot, Sposta giunti e Sposta lineare, dal menu di collegamento.
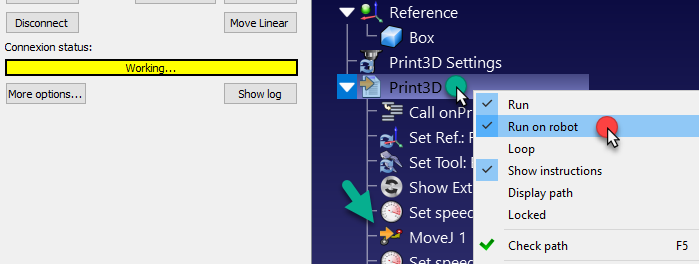
Utilizzi l'opzione Esegui sul robot per spostare il robot mantenendo il feedback in RoboDK (Programmazione online). Questo metodo utilizza il robot come server e ogni istruzione viene inviata al robot passo dopo passo, mentre viene eseguita nel simulatore. Questo metodo è utile per il debug.
1.Clicchi con il tasto destro del mouse sul programma (Print3D, come mostrato nell'immagine seguente).
2.Selezionare Esegui sul robot
3.Clicchi due volte sul programma per avviarlo (oppure clicchi con il tasto destro del mouse e selezioni Esegui).
Una volta selezionata questa opzione, si collegherà al robot reale ogni volta che facciamo doppio clic su un programma (o clicchiamo con il tasto destro del mouse, quindi selezioniamo Esegui).
Queste operazioni sono disponibili anche nell'API RoboDK, che consente di integrare la programmazione dei robot con altre applicazioni. L'API è disponibile in Python e C# e in altri linguaggi di programmazione.