Robot Denso
RoboDK supporta i linguaggi di programmazione PAC e PacScript utilizzati dai robot Denso per la programmazione offline. Basta selezionare il post processor corrispondente e generare il programma del robot
●PAC (controllori RC7 e precedenti)
●PacScript (controllori RC8 e più recenti)
Inoltre, RoboDK supporta anche la programmazione online per i controllori RC7 e RC8 Denso. Questo è possibile con il driver predefinito di RoboDK per Denso. Anche le versioni più vecchie o più recenti possono essere parzialmente supportate.
Questo documento fornisce principalmente informazioni su come utilizzare le funzioni di programmazione online sui controllori robot Denso.
I driver per robot offrono un'alternativa alla Programmazione offline (in cui un programma viene generato, poi trasferito al robot ed eseguito). Con i driver robot, è possibile eseguire una simulazione direttamente sul robot (Programmazione online). Maggiori informazioni sono disponibili nella sezione Driver robot.
Come attivare il server b-Cap
Il server b-Cap deve essere abilitato per utilizzare il robot driver di Denso (programmazione online).
Segua questi passaggi per abilitare il server b-Cap sul lato robot:
1.Passa il controller del robot alla modalità manuale.
2.Selezioni l'opzione e inserisca la password 1214 e attivi l'opzione ORiN.
3.Consentire l'autorizzazione alla comunicazione Ethernet: Menu Impostazione comunicazioni-Permesso-Impostazione lettura/scrittura
4.Imposti il token eseguibile del controllore su Ethernet nel menu di impostazione delle comunicazioni. Questo permette di avviare i programmi dal computer.
Eseguire programmi dal PC
I programmi del robot possono essere eseguiti direttamente da RoboDK al robot reale, se è stata stabilita una connessione di rete.
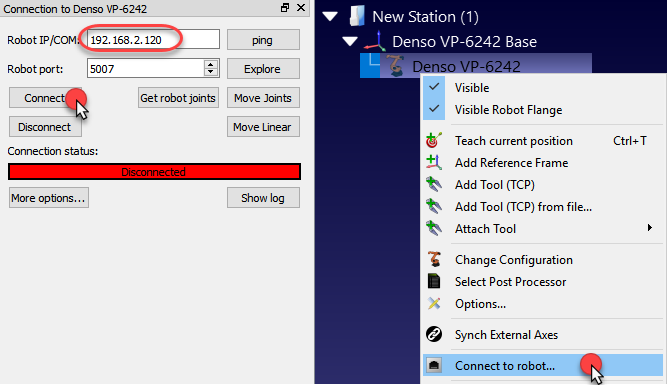
1.Clicchi con il tasto destro del mouse sul robot in RoboDK.
2.Selezionare: 
3.Inserisca l'IP del robot
4.Selezionare Connetti.
Dovrebbe apparire un messaggio verde che indica Pronto se la connessione è riuscita.
Il robot può essere spostato selezionando Ottieni giunti del robot, Sposta giunti e Sposta lineare, dal menu di collegamento.
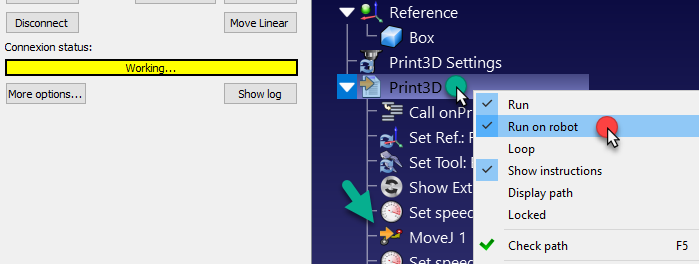
Utilizzi l'opzione Esegui sul robot per spostare il robot mantenendo il feedback in RoboDK (Programmazione online). Questo metodo utilizza il robot come server e ogni istruzione viene inviata al robot passo dopo passo, mentre viene eseguita nel simulatore. Questo metodo è utile per il debug.
1.Clicchi con il tasto destro del mouse sul programma (Print3D, come mostrato nell'immagine seguente).
2.Selezionare Esegui sul robot
3.Clicchi due volte sul programma per avviarlo (oppure clicchi con il tasto destro del mouse e selezioni Esegui).
Una volta selezionata questa opzione, si collegherà al robot reale ogni volta che facciamo doppio clic su un programma (o clicchiamo con il tasto destro del mouse, quindi selezioniamo Esegui).
Queste operazioni sono disponibili anche nell'API RoboDK, che consente di integrare la programmazione dei robot con altre applicazioni. L'API è disponibile in Python e C# e in altri linguaggi di programmazione.
Driver RoboDK per Denso
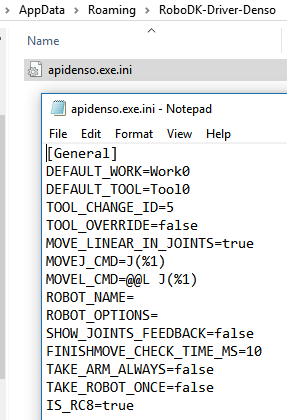
Il driver RoboDK per Denso può essere altamente personalizzato per ottenere un comportamento specifico. Questa personalizzazione può essere effettuata modificando il file ini situato in:
%APPDATA%/RoboDK-Driver-Denso/apidenso.exe.ini
Queste personalizzazioni consentono di specificare il tipo di movimenti o di poter guidare più robot contemporaneamente. Per modificare questo file si può utilizzare qualsiasi editor di testo.
Si possono configurare le seguenti variabili:
●DEFAULT_WORK - Oggetto di lavoro utilizzato di default (stringa variabile).
●DEFAULT_TOOL - Variabile strumento utilizzata per impostazione predefinita.
●TOOL_CHANGE_ID - Variabile utensile di riserva da utilizzare quando impostiamo un nuovo utensile (5=Tool5, ad esempio).
●MOVE_LINEAR_IN_JOINTS - Imponga false per fornire movimenti lineari come bersagli cartesiani.
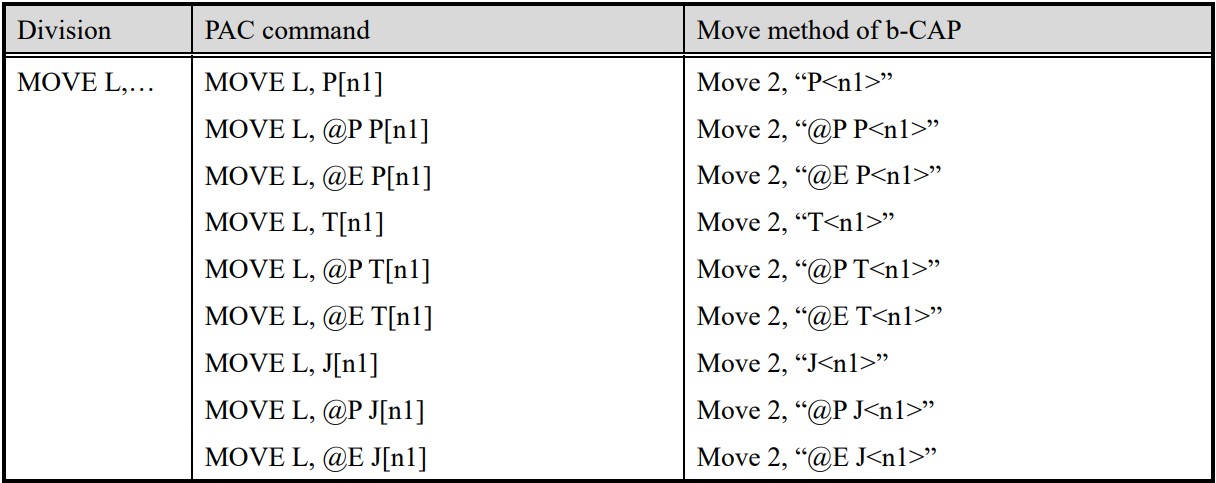
●MOVEJ_CMD - Comando da inviare per un Movimento Congiunto (MoveJ). La tabella seguente fornisce le opzioni consentite.
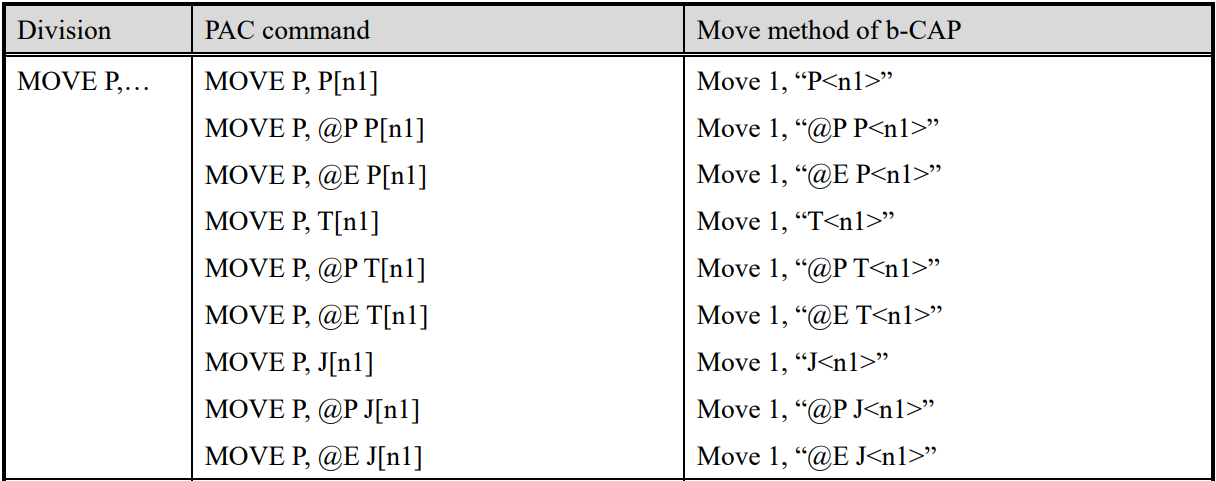
●MOVEL_CMD - Comando da inviare per un Movimento Lineare (MoveL). La tabella seguente fornisce le opzioni consentite.
●ROBOT_NAME - Nome del robot. Specifichi questo nome per selezionare un robot specifico di un controllore.
●ROBOT_OPTIONS - Opzioni del robot per ottenere le risorse del robot. Ad esempio, se stiamo utilizzando il robot slave del controller, dobbiamo specificare ROBOT_OPTIONS="ID=1". L'ID deve essere 0 (predefinito) se vogliamo utilizzare il robot master (robot principale).
●SHOW_JOINTS_FEEDBACK - Impostare su true per vedere il feedback del robot sullo schermo in tempo reale (le prestazioni possono essere più lente).
●FINISH_MOVE_CHECK_MS - Imposta la velocità con cui la posizione del robot deve essere aggiornata sullo schermo quando viene mostrato il feedback dei giunti.
●TAKE_ARMS_ALWAYS - Impostare su true per mantenere le risorse del controllore dopo ogni movimento fino a quando il robot non viene disconnesso (più veloce, ma può portare a risultati inaspettati).
●TAKE_ROBOT_ONCE - Impostare su true per mantenere la risorsa robot dopo ogni movimento mentre il robot è collegato (più veloce, ma può portare a risultati inaspettati).
●IS_RC8 - Impostare su false per collegarsi correttamente ai controllori RC7 e Denso più vecchi.