Trasferisci un Programma Robot
Dobbiamo seguire questi passaggi per caricare un programma dalla chiavetta USB:
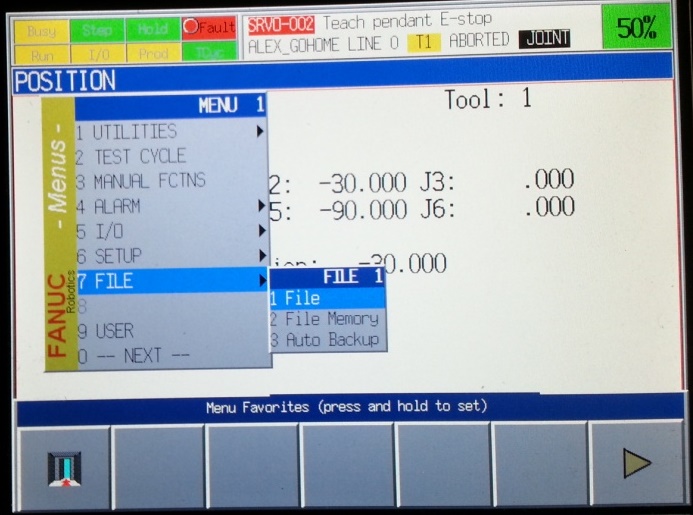
1.Seleziona Menu➔File
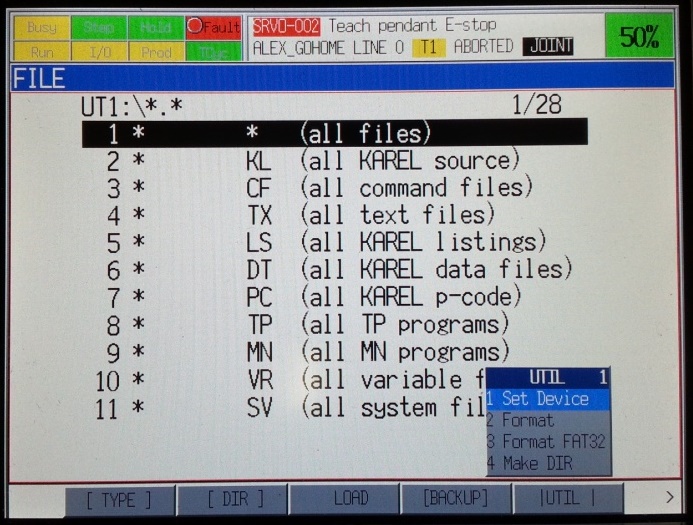
2.Selezione Utilities➔Set device➔USB
3.Seleziona DIR
4.Seleziona il programma TP o LS dalla chiavetta USB (per esempio BALLBARTEST.TP)
Ciò salverà automaticamente il file nella memoria FR del controller
5.Seleziona il programma nella memoria FR e selezione LOAD (tramite pulsante a schermo)
Importante: L'opzione ASCII Upload è richesta per la programmazione offline. Ciò permette di leggere file LS direttamente dal controllore. In alternativa, programmi LS (file ASCII) posson esser compilati in programmi TP (binari) dal PC utilizzando lo strumento WinOLPC Fanuc (MakeTP)
Importante: La velocità lineare dei programmi creati con RoboDK sono definiti dal registro R[10] di default. Se la velocità non è impostata nel programma deve essere impostata manualmente. Nel caso:
Seleziona: DATA➔Type➔Register, R[10]=50 (per una velocità di 50 mm/s)
Seleziona: DATA➔Type➔Register, R[10]=50 (per una velocità di 50 mm/s)