I robot di Han
Questa sezione della documentazione fornisce una panoramica del funzionamento tipico dei robot Han, utilizzando RoboDK per inviare un programma al controller Han.
Trasferisca un programma al controllore di Han
Può importare manualmente i programmi del robot generati da RoboDK nel controller del robot del suo Han.
Per importare un programma RoboDK nel Controller di Han, deve seguire la seguente procedura:
1.Avviare il controller di Han e collegarsi al robot.
2.In RoboDK, fare clic con il pulsante destro del mouse sul programma che si desidera importare e selezionare Genera programma robot come.....
3.RoboDK le chiederà di salvare due file, uno è uno script riga per riga dei comandi che verranno inviati al controllore e l'altro un file .json da caricare sul controllore.
4.Selezioni la posizione in cui desidera salvare ogni file; il file .json può essere salvato in un disco USB per essere importato nel controller come programma.
5.Nel controller, si rechi nella scheda Programma.
6.A destra del nome "Programma corrente" c'è l'icona di una cartella. Selezioni questa icona per aprire l'elenco dei file del programma.
7.Selezioni il pulsante "Importa" in fondo all'elenco.
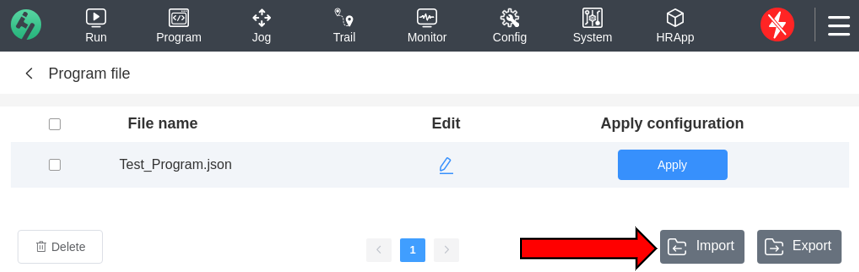
8.Individui il file .json generato da RoboDK sulla USB e lo selezioni.
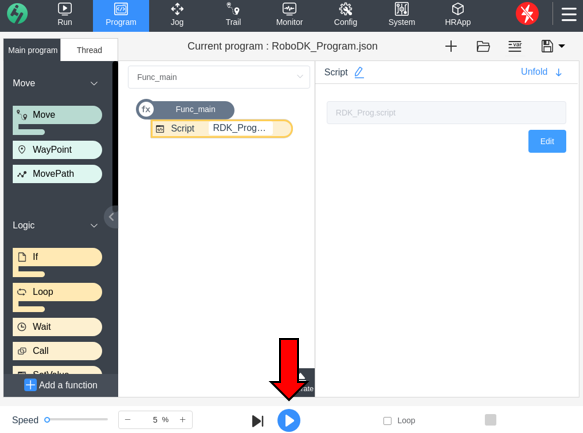
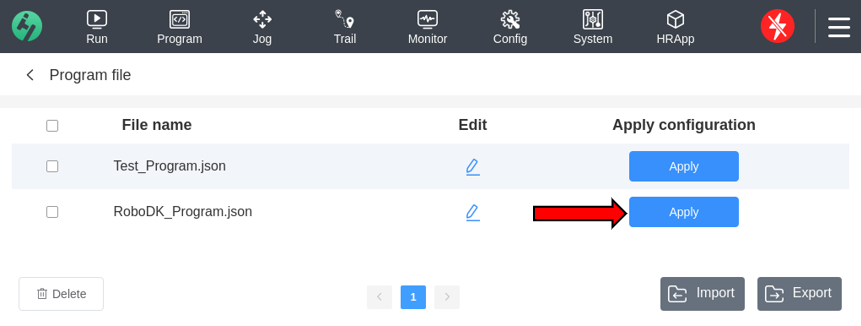
9.Clicchi su "Applica" per impostare il programma importato come programma attivo.
10.Il programma RoboDK sarà importato come una funzione che chiama uno script.
11.Selezionare il pulsante blu di avvio per iniziare l'esecuzione del programma sul robot.