Hanwha robot
RoboDK supporta tutti i controller robot Hanwha. Può creare simulazioni e programmi di robot per Hanwha e può anche spostare il robot Hanwha reale da RoboDK utilizzando il driver.
Driver RoboDK per Hanwha
I driver per robot offrono un'alternativa alla Programmazione offline. Con i driver Hanwha può muovere un robot direttamente da RoboDK mentre simula il suo programma (Programmazione Online). Maggiori informazioni sono disponibili nella sezione Driver robot.
Segua la seguente procedura per configurare RoboDK per lavorare con i robot Hanwha.
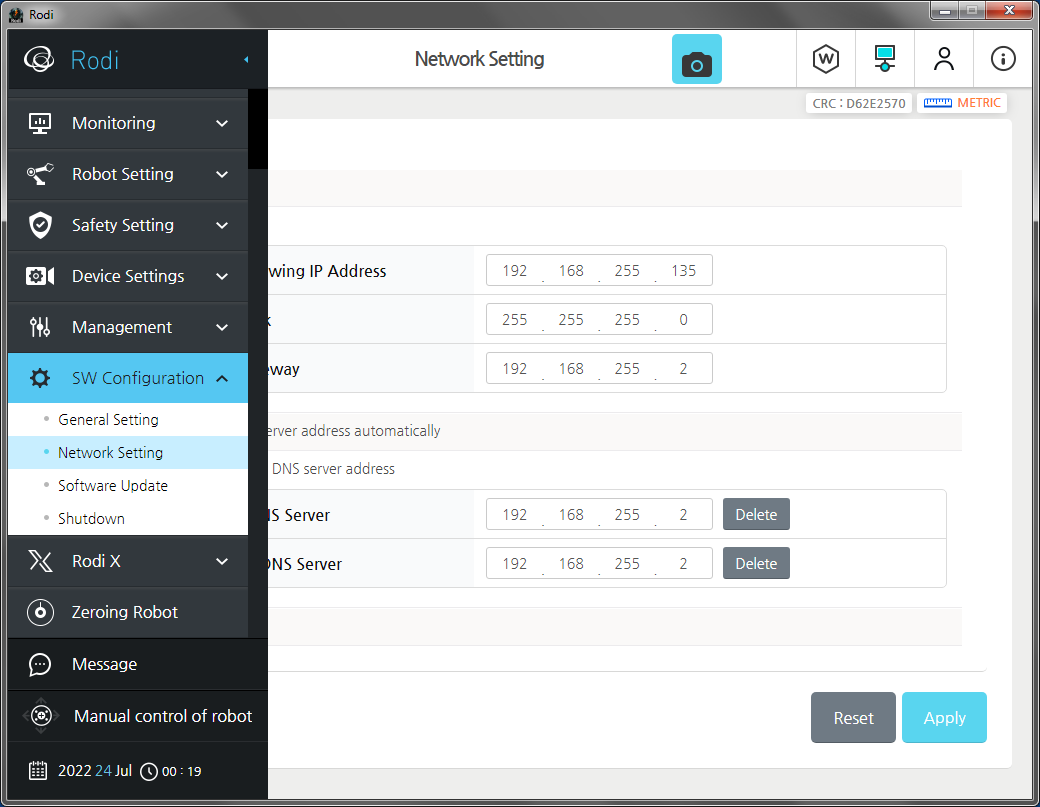
Passo 1. Impostazione dell'indirizzo IP del robot
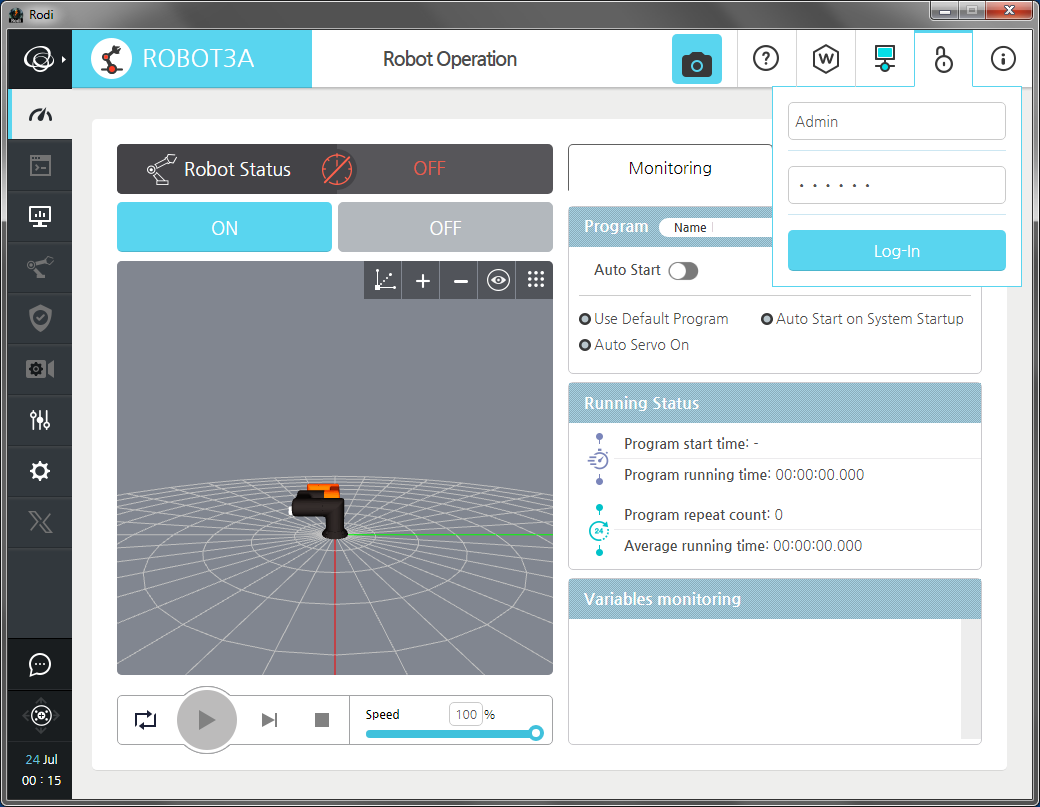
1.Acceda come amministratore
2.Apra Configurazione SW⇒ Impostazione di rete e inserisca i parametri della sua rete locale, in particolare l'indirizzo IP e la subnet mask. Clicchi su Applica e accetti di riavviare se il sistema glielo chiede.
Passo 2. Installare il Plug-in RoboDK Connector
1.Acceda come amministratore
2.Prepari una chiavetta USB con il file RoboDK.asar e la colleghi al controller del robot o al pendente didattico.
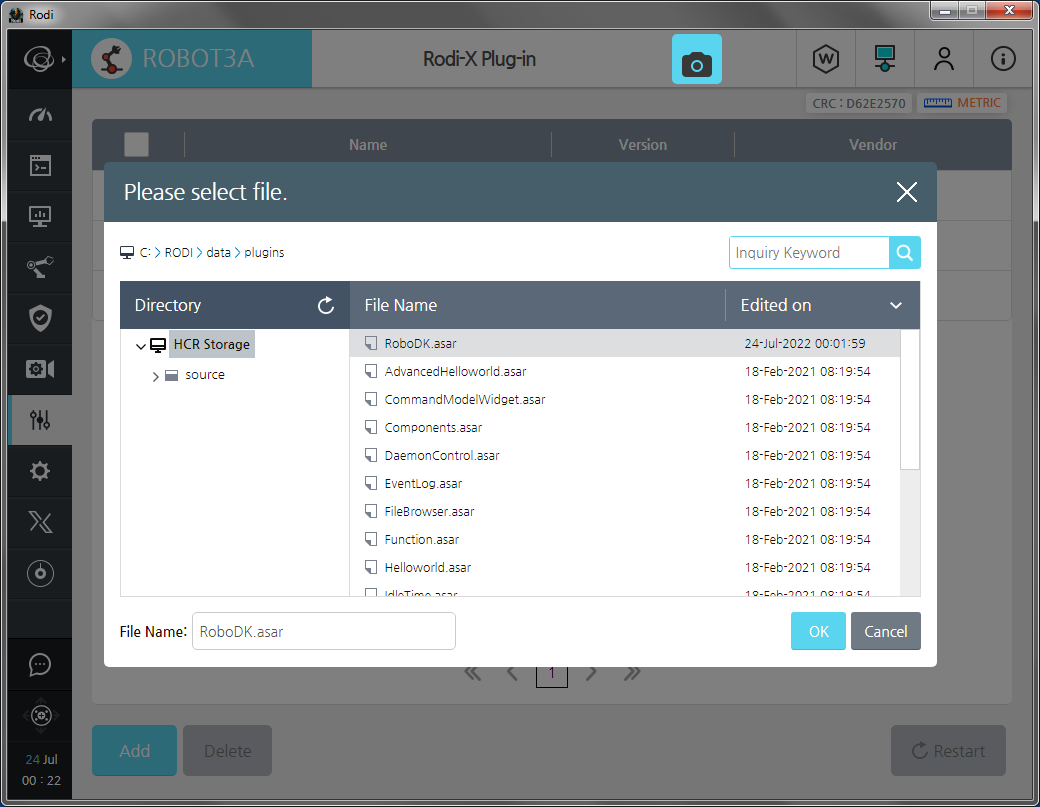
3.Apra Gestione⇒ Rodi-X Plug-in e clicchi sul pulsante Add-in per aprire la finestra di dialogo Seleziona file.
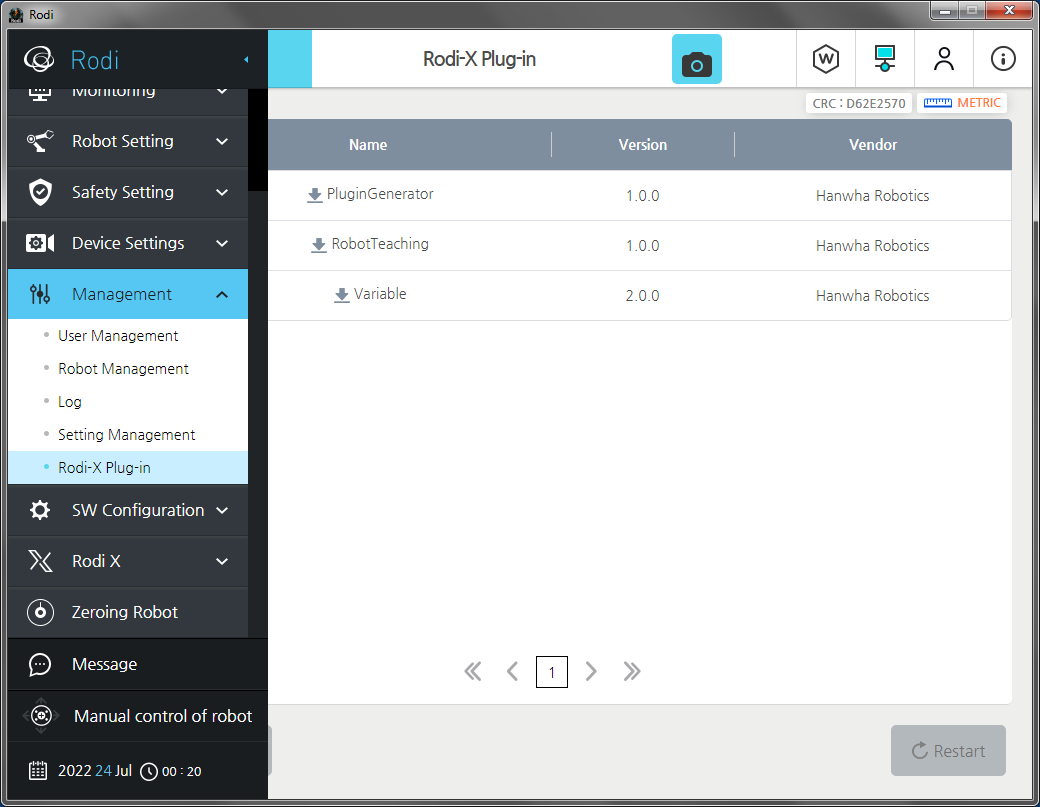
4.Scelga RoboDK.asar e clicchi su OK.
5.Premere il pulsante Riavvia.
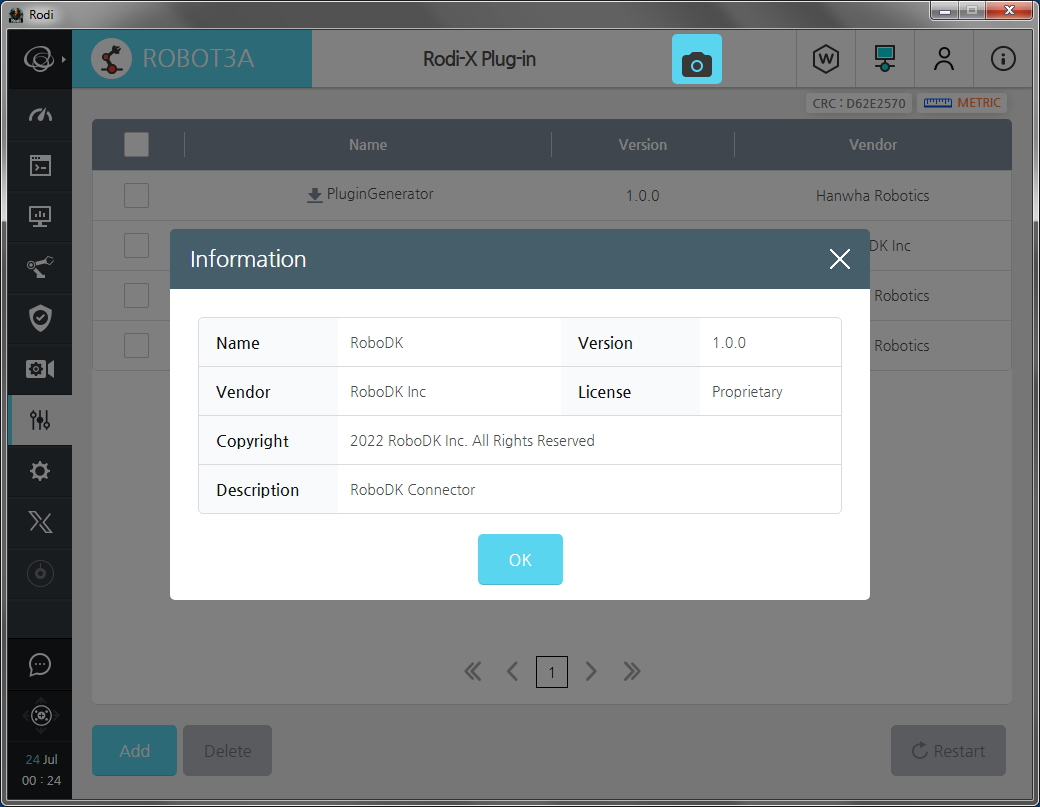
6.Dopo il ricaricamento, potrà vedere le informazioni sul plugin.
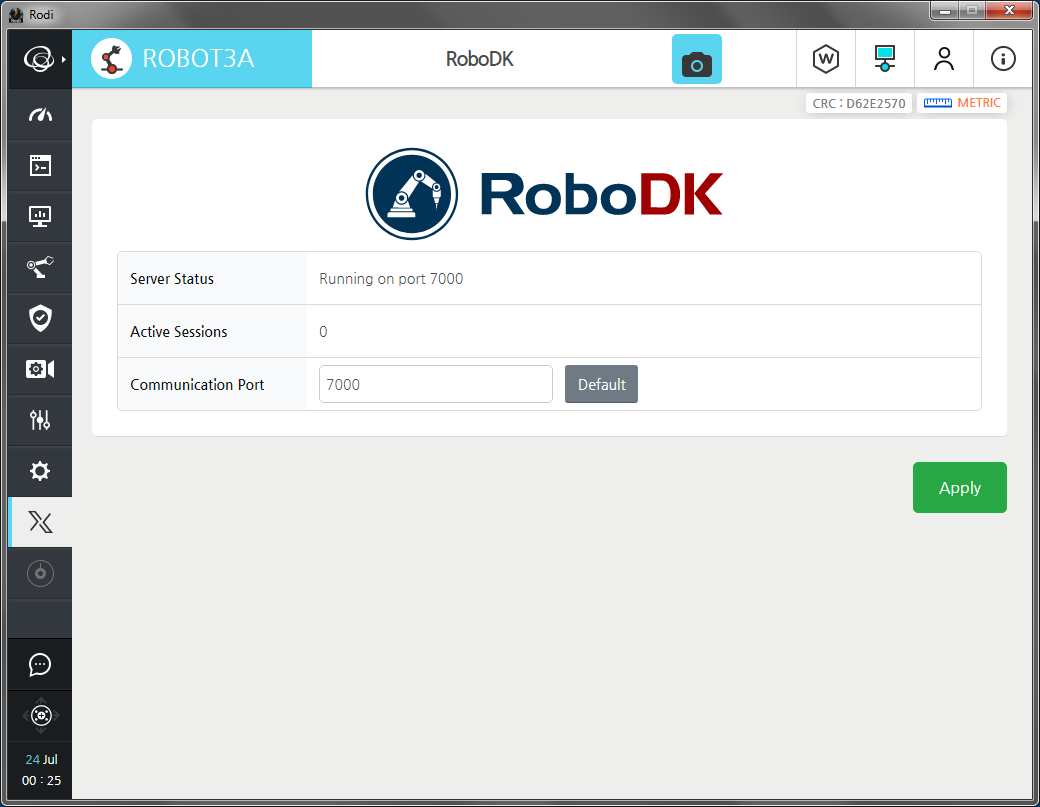
7.Apra Rodi X⇒ RoboDK e si assicuri che il campo Stato del server non contenga messaggi di errore. Se la porta TCP 7000 sembra essere occupata da un'altra applicazione, può cambiarla inserendo un altro valore nel campo Porta di comunicazione e cliccando su Applica.
8.Ora il robot è pronto per il controllo remoto.
Passo 3. Impostazione della connessione a RoboDK
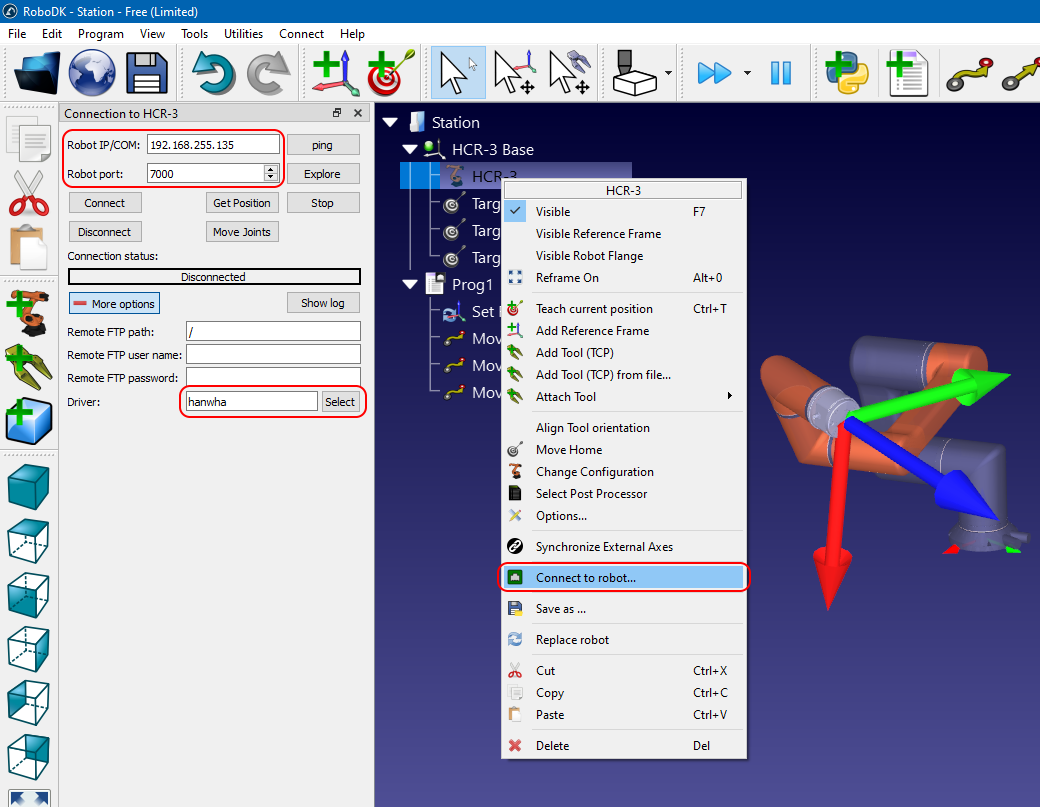
1.Configuri il suo progetto RoboDK e vi inserisca uno dei robot Hanwha. Ad esempio, l'HCR-3.
2.Clicchi con il tasto destro del mouse sul robot nella struttura del progetto e selezioni Connetti al robot...
3.Nella finestra Connessione a HCR-3, compili i campi IP/COM del robot e Porta del robot (utilizzi l'indirizzo IP del robot e il numero di porta del plug-in RoboDK).
4.Nella stessa finestra, clicchi sul pulsante Altre opzioni e digiti Hanwha nel campo Driver (oppure utilizzi il pulsante Seleziona per selezionare il driver appropriato dall'elenco).
5.Clicchi sul pulsante Connetti e se tutte le impostazioni sono corrette, vedrà Pronto nella barra di stato della connessione.