Driver RoboDK per JAKA
È possibile stabilire una connessione tra RoboDK e il robot JAKA per muovere il robot automaticamente da un PC collegato che utilizza RoboDK. Ciò consente di utilizzare l'opzione RoboDK Run on robot per la programmazione e il debug online. La connessione può essere stabilita attraverso una connessione Ethernet standard (TCP/IP).
Segua questi passaggi per impostare il driver RoboDK per la programmazione online JAKA:
1.Avviare l'applicazione JAKA Zu e collegarsi al robot nell'applicazione JAKA Zu.
2.Accendere e abilitare il robot JAKA Zu.
3.Nella barra degli strumenti RoboDK, selezioni Connetti➔ Connetti Robot.
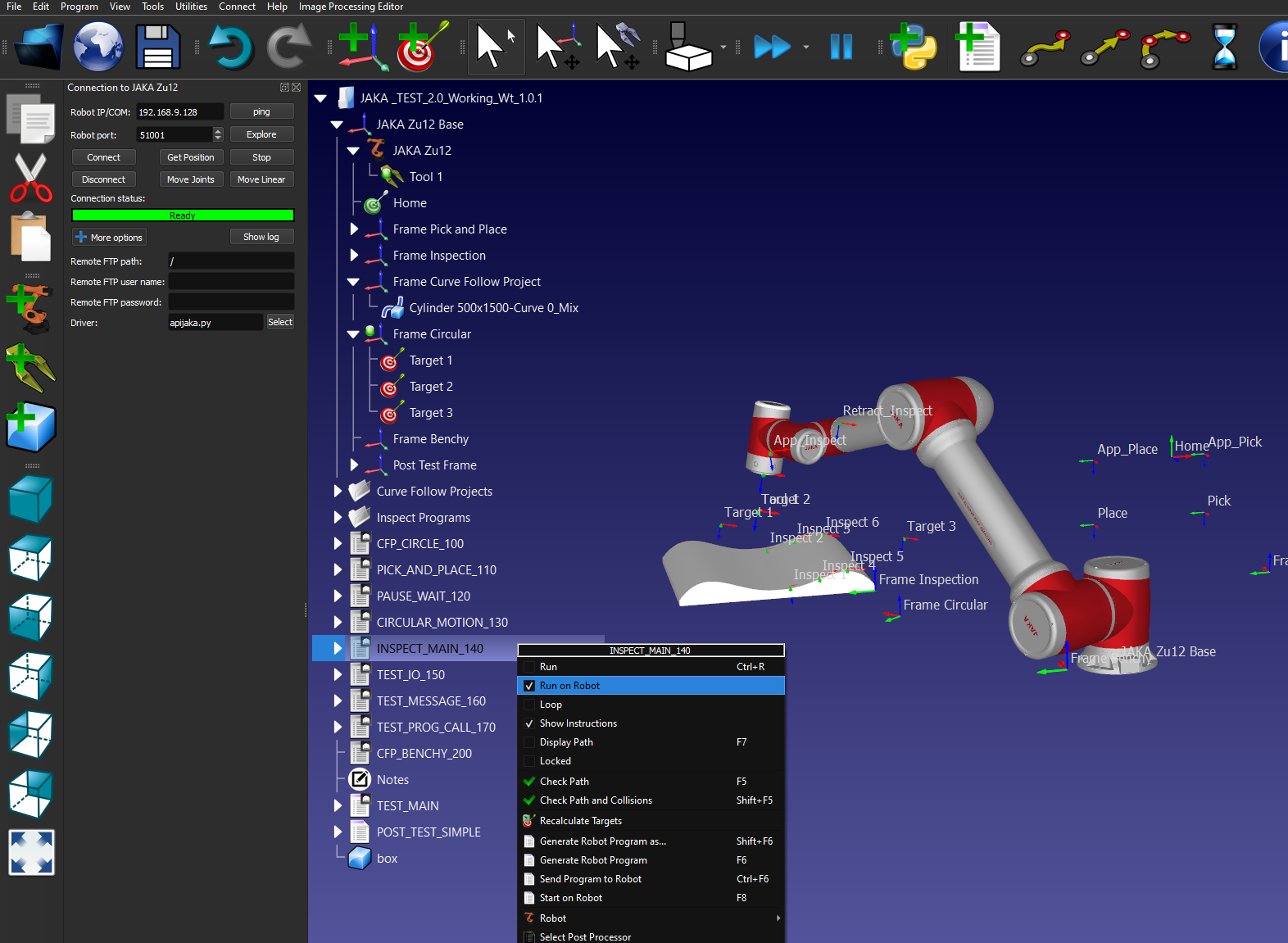
4.Sotto "Altre opzioni", selezioni il driver JAKA: apijaka.py.
5.Utilizzi l'IP e la porta del robot per collegarsi al robot in RoboDK.
6.Ora può spostare il robot JAKA direttamente da RoboDK.
a.Per spostare il robot verso un bersaglio in RoboDK, faccia doppio clic sul bersaglio nell'albero delle stazioni e selezioni i pulsanti "Sposta i giunti" o "Sposta lineare" nell'interfaccia di connessione per eseguire uno spostamento dei giunti o lineare verso il bersaglio.
b.Per eseguire un programma sul robot utilizzando il driver, faccia clic con il pulsante destro del mouse sul programma desiderato e selezioni l'opzione "Esegui sul robot". Poi, faccia doppio clic sul programma per eseguirlo sul robot.