Sostituisca manualmente il piano di riferimento del robot
I passi seguenti mostrano come configurare manualmente il piano di riferimento del robot nell'applicazione JAKA Zu.
Per prima cosa, deve creare una cornice JAKA Zu personalizzata:
1.In JAKA Zu, vada su Impostazioni➔ Impostazioni operative➔ Sistema di coordinate utente.
2.Clicchi sul pulsante di modifica per impostare i valori X, Y, Z, RX, RY e RZ per una cornice personalizzata.
3.Selezionare conferma per salvare la cornice in JAKA Zu.
Quindi, deve sostituire la cornice importata con la cornice JAKA Zu:
4.Segua i passi elencati in Inviare un programma a JAKA Zu.
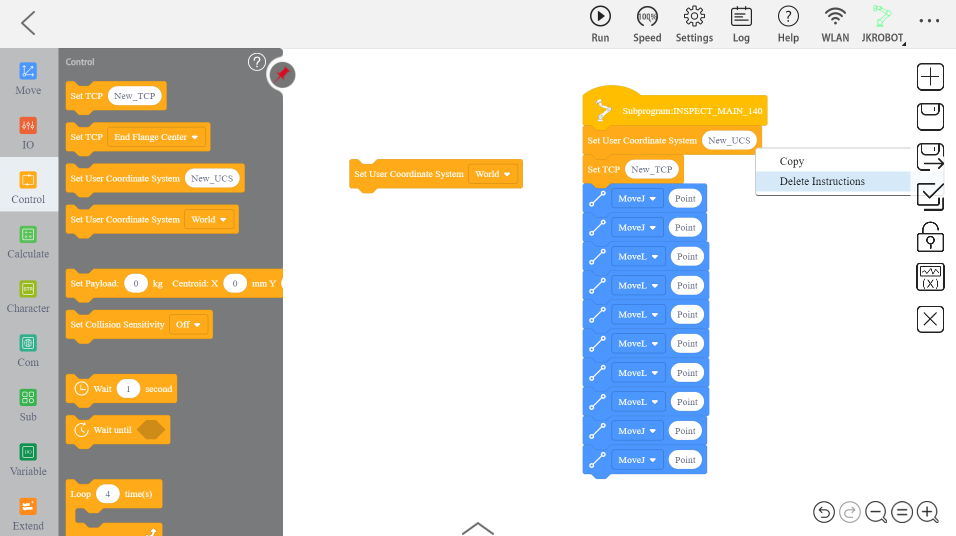
5.Apra la scheda Controllo nella barra laterale e individui il riquadro "Imposta sistema di coordinate utente" contenente la casella a discesa.
6.Rimuova la piastrella "New_UCS" che è stata importata automaticamente facendo clic con il pulsante destro del mouse e selezionando Elimina.
7.Sostituisca la piastrella rimossa con la piastrella "Imposta sistema di coordinate utente" e selezioni la cornice personalizzata dal menu a tendina.